§ 1. प्रोपेलर का उद्देश्य और प्रकार
प्रोपेलर का उद्देश्य इंजन से प्रसारित टॉर्क को वायुगतिकीय बल में परिवर्तित करना है। वायुगतिकीय बल के गठन को यांत्रिकी के तीसरे नियम द्वारा समझाया गया है। जैसे ही प्रोपेलर घूमता है, यह हवा के एक निश्चित द्रव्यमान को पकड़ता है और बाहर फेंकता है। यह द्रव्यमान, इजेक्शन का विरोध करते हुए, प्रोपेलर को विमान के साथ इजेक्शन की दिशा के विपरीत दिशा में धकेलता है।
प्रोपेलर के वायुगतिकीय बल के निर्माण का कारण प्रोपेलर द्वारा फेंके गए वायु द्रव्यमान की प्रतिक्रिया है।
विमान को आगे बढ़ाने के लिए आवश्यक जोर पैदा करने के लिए हवाई जहाज प्रोपेलर का उपयोग किया जाता है।
हेलीकॉप्टर का मुख्य रोटर हेलीकॉप्टर को हवा में रखने के लिए आवश्यक लिफ्ट और हेलीकॉप्टर को आगे बढ़ाने के लिए आवश्यक जोर पैदा करने का काम करता है। जैसा कि कहा गया है, हेलीकॉप्टर के फायदों में से एक इसकी किसी भी दिशा में जाने की क्षमता है। हेलीकॉप्टर की गति की दिशा इस बात पर निर्भर करती है कि मुख्य रोटर का जोर बल कहाँ झुका हुआ है - आगे, पीछे या बग़ल में (चित्र 1.32)।
मुख्य रोटर सभी मोड में हेलीकॉप्टर की नियंत्रणीयता और स्थिरता सुनिश्चित करता है। इस प्रकार, मुख्य रोटर एक साथ विंग, ट्रैक्टर रोटर और मुख्य नियंत्रण के रूप में कार्य करता है।
हेलीकॉप्टर टेल रोटर्स हेलीकॉप्टर के प्रतिक्रिया टॉर्क और दिशात्मक नियंत्रण को संतुलित करने का काम करते हैं।
§ 2. मुख्य रोटर की विशेषता वाले बुनियादी पैरामीटर
हेलीकॉप्टर के मुख्य रोटर की विशेषता बताने वाले मुख्य मापदंडों में शामिल हैं:
ब्लेडों की संख्या. आधुनिक हेलीकॉप्टर तीन-, चार- और पांच-ब्लेड वाले प्रोपेलर का उपयोग करते हैं। ब्लेडों की संख्या बढ़ने से ब्लेडों के हानिकारक पारस्परिक प्रभाव के कारण रोटर का प्रदर्शन खराब हो जाता है। ब्लेडों की संख्या (तीन से कम) कम करने से रोटर द्वारा बनाए गए जोर की प्रकृति स्पंदित हो जाती है और उड़ान में हेलीकॉप्टर का कंपन बढ़ जाता है। मुख्य रोटर व्यास डी रोटेशन के दौरान ब्लेड के सिरों द्वारा वर्णित सर्कल का व्यास है। इस वृत्त की त्रिज्या को R अक्षर द्वारा निर्दिष्ट किया जाता है और इसे मुख्य रोटर की त्रिज्या कहा जाता है। मुख्य रोटर के घूर्णन अक्ष से विचाराधीन अनुभाग तक की दूरी को अक्षर g (चित्र 1.33) द्वारा दर्शाया गया है।
गणना से पता चलता है कि प्रोपेलर को समान शक्ति आपूर्ति के साथ, बढ़ते व्यास के साथ इसका जोर बढ़ता है। इसलिए, उदाहरण के लिए, व्यास को दोगुना करने से जोर 1.59 गुना बढ़ जाता है, व्यास को पांच गुना बढ़ाने से जोर 2.92 गुना बढ़ जाता है।
हालाँकि, व्यास में वृद्धि प्रोपेलर के वजन में वृद्धि के साथ जुड़ी हुई है, ब्लेड की ताकत सुनिश्चित करने में बड़ी कठिनाई के साथ, ब्लेड की निर्माण तकनीक की जटिलता के साथ, पूंछ की लंबाई में वृद्धि के साथ जुड़ी हुई है। उछाल, आदि
इसलिए, हेलीकॉप्टर विकसित करते समय, एक निश्चित इष्टतम व्यास का चयन किया जाता है।
मुख्य रोटर F0M द्वारा प्रवाहित क्षेत्र घूर्णन के दौरान मुख्य रोटर ब्लेड के सिरों द्वारा वर्णित वृत्त का क्षेत्र है।
स्वेप्ट क्षेत्र की अवधारणा पेश की गई है क्योंकि इस क्षेत्र को एक निश्चित भार वहन करने वाली सतह के रूप में माना जा सकता है, जो हवा की चिपचिपाहट और जड़ता के कारण एक हवाई जहाज के पंख के समान है, जो कि स्वेप्ट क्षेत्र से बहते समय एक सामान्य जेट बनाता है। प्रोपेलर. आधुनिक हेलीकाप्टरों का F0M=100-:-1000 m2 होता है।
स्वेप्ट क्षेत्र पी पर भार हेलीकॉप्टर जी के वजन और उसके घूर्णन के दौरान प्रोपेलर द्वारा स्वेप्ट किए गए क्षेत्र का अनुपात है:
FomP=G/Fom(किग्रा/m2).
पी में वृद्धि से अधिकतम उड़ान ऊंचाई में कमी आती है और मुख्य रोटर के स्व-घूर्णन मोड में वंश की दर में वृद्धि होती है।
आधुनिक हेलीकॉप्टरों के लिए P=12-:-45kg/m2, या 118-:-440n/m2
भरण कारक Q एक मान है जो दिखाता है कि स्वेप्ट क्षेत्र का कौन सा हिस्सा सभी प्रोपेलर ब्लेड का क्षेत्र है।
योजना में ब्लेड का आकार(चित्र 1.34)। मुख्य रोटर ब्लेड में एक आयताकार, ट्रेपेज़ॉइडल या मिश्रित प्लानफॉर्म हो सकता है। ट्रेपेज़ॉइडल ब्लेड की संकीर्णता 2-3 से अधिक नहीं है।
ब्लेड का टेपर बट पर कॉर्ड और टिप कॉर्ड का अनुपात है।
ब्लेड प्रोफाइल उसके क्रॉस सेक्शन का आकार है। रोटर ब्लेड के लिए विमान के पंखों के समान प्रोफाइल का उपयोग किया जाता है। आमतौर पर ये सापेक्ष मोटाई c = के साथ असममित प्रोफाइल होते हैं
7-=-14%'. इसकी लंबाई के साथ प्रोफ़ाइल का आकार परिवर्तनशील हो सकता है (ब्लेड का वायुगतिकीय मोड़)। चुनते समय, प्रोफ़ाइल आकार यह सुनिश्चित करने का प्रयास करते हैं कि इसमें सबसे बड़ी वायुगतिकीय गुणवत्ता हो
ब्लेड अनुभाग के आक्रमण का कोण a किसी दिए गए अनुभाग में प्रोफ़ाइल कॉर्ड और आने वाले वायु प्रवाह की दिशा के बीच का कोण है। हमले के कोण का परिमाण वायुगतिकीय बल गुणांक के मूल्यों को निर्धारित करता है।
स्थापना कोण Фप्रोफ़ाइल के तार और मुख्य रोटर के घूर्णन के तल के बीच का कोण कहा जाता है। हेलीकॉप्टर प्रोपेलर के इंस्टॉलेशन कोण को रोटर त्रिज्या के 0.7 की दूरी पर मापा जाता है। यह सम्मेलन ब्लेड के ज्यामितीय मोड़ की उपस्थिति के कारण पेश किया गया था, जिसके कारण ब्लेड के सभी वर्गों की अलग-अलग (अंत की ओर घटती हुई) स्थापना होती है कोण. ज्यामितीय मोड़ की आवश्यकता को इस प्रकार समझाया गया है। सबसे पहले, ब्लेड के अंत की ओर बढ़ती परिधीय गति के कारण, प्रेरित वेगों का असमान वितरण होता है, और, परिणामस्वरूप, ब्लेड की लंबाई के साथ वायुगतिकीय बल। अधिक समान भार वितरण सुनिश्चित करने के लिए, ब्लेड के अंत की ओर स्थापना कोण कम कर दिया गया है। दूसरे, आगे की उड़ान में, ब्लेड की एक निश्चित स्थिति पर हमले के कोण में वृद्धि के कारण, ब्लेड के सिरों पर प्रवाह रुक जाता है; ज्यामितीय मोड़ की उपस्थिति टर्मिनल स्टाल को उच्च उड़ान गति की ओर धकेलती है। इस मुद्दे पर नीचे अधिक विस्तार से चर्चा की जाएगी।
मुख्य रोटर ब्लेड की पिच तब बदल जाती है जब इसे अक्षीय काज में घुमाया जाता है, अर्थात। अनुदैर्ध्य अक्ष के चारों ओर.
संरचनात्मक रूप से, मुख्य रोटर को इस तरह से डिज़ाइन किया गया है कि अक्षीय काज में इसके सभी ब्लेड एक साथ एक ही कोण या विभिन्न कोणों पर घूम सकते हैं।
हमले का रोटर कोण. ऊपर कहा गया था कि मुख्य रोटर द्वारा प्रवाहित क्षेत्र को एक असर सतह के रूप में माना जा सकता है, जिसके प्रति इकाई क्षेत्र पर एक निश्चित भार पड़ता है।
आइए अवधारणा का परिचय दें - मुख्य रोटर ए के हमले का कोण, जिसके द्वारा हमारा मतलब मुख्य रोटर के घूर्णन के विमान और आने वाले वायु प्रवाह की दिशा (उड़ान दिशा) के बीच का कोण है। यदि प्रवाह नीचे से मुख्य रोटर के घूर्णन के तल तक पहुंचता है (चित्र 1.36), तो हमले का कोण सकारात्मक माना जाता है, यदि ऊपर से - नकारात्मक।
चूंकि हेलीकॉप्टर हवा में किसी भी दिशा में चलता है, मुख्य रोटर के हमले का कोण ±180° के भीतर भिन्न हो सकता है। ऊर्ध्वाधर अवतरण के साथ A = +90°, ऊर्ध्वाधर आरोहण के साथ A = -90°।
ब्लेड अज़ीमुथल स्थिति कोण. जब एक हेलीकॉप्टर उड़ता है, तो मुख्य रोटर ब्लेड की घूर्णी गति पूरे हेलीकॉप्टर की आगे की गति के साथ जुड़ जाती है। इस कारण से, ब्लेड की परिचालन स्थितियाँ काफी हद तक उड़ान की दिशा के सापेक्ष उनकी स्थिति पर निर्भर करती हैं। उनकी स्थिति के आधार पर ब्लेड के संचालन की विशेषताओं का आकलन करने के लिए, ब्लेड की अज़ीमुथल स्थिति की अवधारणा पेश की गई है।
ब्लेड का अज़ीमुथल स्थिति कोण उड़ान की दिशा और ब्लेड के अनुदैर्ध्य अक्ष के बीच का कोण है (चित्र 1.37)।
यह आमतौर पर स्वीकार किया जाता है कि φ = 0 यदि ब्लेड का अनुदैर्ध्य अक्ष आने वाले वायु प्रवाह की दिशा से मेल खाता है। यह ध्यान दिया जाना चाहिए (चूंकि हेलीकॉप्टर आगे, पीछे या बग़ल में जा सकता है) कि सभी मामलों में अज़ीमुथल स्थिति कोण को ब्लेड की दिशा से मापा जाना चाहिए, जो आने वाले वायु प्रवाह की दिशा से मेल खाता है। गिनती आमतौर पर मुख्य रोटर के घूमने की दिशा में की जाती है। यह स्पष्ट है कि ब्लेड की अज़ीमुथल स्थिति का कोण प्रति क्रांति 0 से 360° (0 से 2l तक) बदलता है।
मुख्य रोटर के चक्करों की संख्या. इस तथ्य के कारण कि हेलीकॉप्टर रोटर बड़े-व्यास वाले रोटर हैं, उनकी गति कम है - 100-600 आरपीएम।
जैसा कि गणना से पता चलता है, अधिकतम संभव जोर (किसी दी गई शक्ति के लिए) के साथ एक प्रोपेलर रखने के लिए, इसके व्यास को बढ़ाना और गति को कम करना आवश्यक है। इसलिए, उदाहरण के लिए, जोर को तीन गुना बढ़ाने के लिए, गति को पंद्रह गुना कम करना होगा (इस मामले में, प्रोपेलर का व्यास लगभग पांच गुना बढ़ जाएगा)।
किसी विशेष प्रोपेलर के लिए, बढ़ती गति के साथ जोर बढ़ता है, लेकिन इसके लिए इनपुट शक्ति में वृद्धि की आवश्यकता होती है।
मुख्य रोटर के घुमावों की संख्या तरंग संकट द्वारा सीमित होती है, जो मुख्य रूप से आने वाले प्रवाह की ओर बढ़ने वाले ब्लेड के सिरों पर होती है (अजीमुथ आर = 90° के पास)।
तरंग कर्षण पर काबू पाने के कारण बड़े नुकसान से बचने के लिए, आधुनिक हेलीकॉप्टरों के मुख्य रोटरों के क्रांतियों की संख्या को चुना जाता है ताकि ब्लेड के सिरों में सबसोनिक प्रवाह गति हो। आधुनिक हेलीकॉप्टरों में, ब्लेड युक्तियों की परिधीय गति 200-250 मीटर/सेकंड तक पहुंच जाती है।
§ 3. अक्षीय प्रवाह के दौरान एक आदर्श रोटर का जोर बल
एक आदर्श स्क्रू वह स्क्रू होता है जिसके संचालन में घर्षण हानि और स्क्रू के पीछे जेट के मुड़ने को ध्यान में नहीं रखा जाता है। अक्षीय प्रवाह मोड एक ऐसा मोड है जिसमें वायु प्रवाह प्रोपेलर के घूर्णन अक्ष के साथ निर्देशित होता है। इस मामले में, मुख्य रोटर के आक्रमण का कोण 90° है। अक्षीय प्रवाह मोड में, मुख्य रोटर हेलीकॉप्टर के मंडराने, ऊर्ध्वाधर चढ़ाई और ऊर्ध्वाधर वंश के दौरान काम करता है।
मुख्य रोटर U1 की गति से हवा खींचता है और U2 की गति से उसे बाहर फेंकता है। गति U1 और U2 को आगमनात्मक गति कहा जाता है (चित्र 1.38)।
यदि प्रोपेलर के चारों ओर प्रवाह की गति V के बराबर है, तो प्रोपेलर के सामने यह V + U1 के बराबर हो जाती है, और प्रोपेलर के पीछे V+U2 के बराबर हो जाती है।
वायु द्रव्यमान, बहे हुए क्षेत्र से गुजरते हुए, प्रोपेलर द्वारा बनाए गए बल F की कार्रवाई के तहत त्वरण j प्राप्त करता है। यांत्रिकी के तीसरे नियम के आधार पर, हवा रोटर पर समान परिमाण लेकिन विपरीत निर्देशित बल T के साथ कार्य करती है। फोर्स टी प्रोपेलर थ्रस्ट है। यांत्रिकी के दूसरे नियम के आधार पर, टी = एमजे। बहे हुए क्षेत्र से गुजरने वाली हवा का द्रव्यमान द्रव्यमान घनत्व द्वारा मात्रा को गुणा करके निर्धारित किया जा सकता है। एन. ई. ज़ुकोवस्की ने सैद्धांतिक रूप से साबित किया और प्रयोगात्मक रूप से पुष्टि की कि अस्वीकृति की आगमनात्मक गति सक्शन की आगमनात्मक गति से दोगुनी है। दूसरे शब्दों में, प्रोपेलर डिस्क पर प्रेरित गति प्रोपेलर से गुजरने वाली हवा द्वारा प्राप्त कुल गति वृद्धि के आधे के बराबर है।
आगमनात्मक चूषण गति प्रयोगात्मक रूप से निर्धारित की जाती है और 8-15 मीटर/सेकंड के बराबर होती है।
परिणामी थ्रस्ट सूत्र से यह पता चलता है कि मुख्य रोटर का थ्रस्ट बल हवा के द्रव्यमान घनत्व, स्वेप्ट क्षेत्र और प्रेरक चूषण गति पर निर्भर करता है।
उड़ान की ऊंचाई में वृद्धि या परिवेश के तापमान में वृद्धि के साथ, द्रव्यमान घनत्व पी, और इसलिए जोर बल कम हो जाता है। बढ़ती गति और प्रोपेलर पिच के साथ, आगमनात्मक गति U1 (प्रोपेलर थ्रस्ट) बढ़ जाती है।
मुख्य रोटर Fоv द्वारा प्रवाहित क्षेत्र एक डिज़ाइन पैरामीटर है और एक विशेष रोटर के लिए स्थिर है।
रोटर थ्रस्ट को दूसरे तरीके से भी प्राप्त किया जा सकता है - व्यक्तिगत ब्लेड द्वारा बनाए गए वायुगतिकीय बलों के योग के रूप में, क्योंकि ब्लेड के चारों ओर प्रवाह पंख के चारों ओर प्रवाह के समान होता है। हालाँकि, अंतर यह है कि ब्लेड अनुवादात्मक नहीं, बल्कि घूर्णी गति करता है, और इसलिए इसके सभी खंड (तत्व) अलग-अलग गति से चलते हैं। इसलिए, ब्लेड द्वारा बनाए गए वायुगतिकीय बल की गणना कार्य करने वाले वायुगतिकीय बलों के योग के रूप में की जानी चाहिए
ब्लेड तत्व पर (चित्र 1.39)।
ब्लेड तत्व ΔY का उठाने वाला बल और तत्व ΔX का खिंचाव, क्रमशः तत्व ΔT के जोर बल और तत्व ΔQ के घूर्णी प्रतिरोध बल से परिमाण में भिन्न होता है।
इसे इस तथ्य से समझाया गया है कि लिफ्ट बल को अनुभाग पर प्रवाह के लंबवत निर्देशित किया जाता है, ड्रैग बल को प्रवाह के साथ निर्देशित किया जाता है, कर्षण बल तत्व के घूर्णन के विमान के लंबवत होता है, और प्रतिरोध का बल तत्व के घूर्णन के विमान के लंबवत होता है। घूर्णन घूर्णन के तल में स्थित है।
§ 4. तिरछे प्रवाह के दौरान रोटर का जोर बल
तिरछी प्रवाह व्यवस्था को एक ऐसी व्यवस्था के रूप में समझा जाता है जिसमें वायु प्रवाह को मुख्य रोटर के घूर्णन के विमान पर हमले के एक निश्चित मनमाने कोण पर निर्देशित किया जाता है (90 डिग्री के बराबर नहीं)। यह मोड हेलीकॉप्टर की क्षैतिज उड़ान के साथ-साथ एक झुके हुए प्रक्षेपवक्र के साथ चढ़ाई और वंश के दौरान किया जाता है।
अध्ययन के तहत मुद्दे को सरल बनाने के लिए, हम पहले मुख्य रोटर के चारों ओर पार्श्व प्रवाह के मामले पर विचार करेंगे, यानी, एक ऐसा मामला जिसमें प्रवाह मुख्य रोटर के घूर्णन के विमान के समानांतर निर्देशित होता है और रोटर के हमले का कोण होता है शून्य। इस मामले में, आने वाले प्रवाह वेग V को चूषण वेग u में जोड़ा जाता है और परिणामी वेग V1 देता है (चित्र 1.41)। यह स्पष्ट है कि V>u1.
सूत्र से यह स्पष्ट है कि समान इजेक्शन गति U2 पर, पार्श्व प्रवाह के दौरान प्रोपेलर का जोर अक्षीय प्रवाह की तुलना में अधिक होता है। भौतिक रूप से, इसे प्रोपेलर द्वारा प्रवाहित क्षेत्र से बहने वाली हवा के दूसरे द्रव्यमान में वृद्धि से समझाया गया है।
तिरछे प्रवाह के अधिक सामान्य मामले पर विचार करते समय, जब हवा मुख्य रोटर ए के हमले के कुछ मनमाने कोण पर प्रोपेलर द्वारा प्रवाहित विमान के पास पहुंचती है, तो हमें एक समान तस्वीर मिलती है। केवल यह ध्यान रखना आवश्यक है कि प्रत्येक विशिष्ट मामले में रोटर के विमान में बहने वाली हवा की परिणामी गति आने वाली प्रवाह गति और सक्शन गति के ज्यामितीय योग के बराबर होनी चाहिए।
§ 5. मुख्य रोटर के जोर बल को बदलना
तिरछे प्रवाह के साथ, ब्लेड की अज़ीमुथल स्थिति पर निर्भर करता है
रोटर के चारों ओर तिरछे प्रवाह के साथ, ब्लेड के चारों ओर प्रवाह की गति घूर्णी गति की गति और आने वाले वायु प्रवाह की अनुवादात्मक गति का योग है। तर्क की सरलता के लिए, आइए ब्लेड के अंतिम भाग के चारों ओर प्रवाह पर विचार करें। ध्यान दें कि ब्लेड के साथ निर्देशित आने वाले प्रवाह वेग का घटक लिफ्ट के निर्माण में भाग नहीं लेता है। अंतिम खंड की परिधीय गति wR है। मान लीजिए कि आने वाले प्रवाह की गति V के बराबर है। आइए हम इस गति को ब्लेड के अनुदिश दिशा और उसके लंबवत में विघटित करें (चित्र 1.42)।
अज़ीमुथ 90° पर यह +V के बराबर हो जाता है और azimuth 270° पर -V के बराबर हो जाता है। इस प्रकार, ब्लेड की एक क्रांति के दौरान, इसके चारों ओर प्रवाह वेग अधिकतम 90° के दिगंश पर और न्यूनतम 270° के दिगंश पर पहुंच जाता है।
सूत्र से हम देखते हैं कि ब्लेड का जोर बल एक परिवर्तनीय मात्रा है और अज़ीमुथ पर निर्भर करता है। इसका अधिकतम मान 90° के अज़ीमुथ पर प्राप्त होता है, जब परिधीय गति का मान उड़ान गति में जोड़ा जाता है, न्यूनतम मान 270° के अज़ीमुथ पर होता है, जब उड़ान की गति परिधीय गति से घटा दी जाती है।
दो-ब्लेड प्रोपेलर के जोर बल का परिमाण अज़ीमुथ पर निर्भर करता है और एक परिवर्तनीय मान है। दो-ब्लेड रोटर के थ्रस्ट बल के परिवर्तनशील घटक के कारण हेलीकॉप्टर का कंपन बढ़ जाता है, और इसलिए दो-ब्लेड रोटर का उपयोग सीमित है। तीन-ब्लेड वाले प्रोपेलर के थ्रस्ट बल की गणना करने के लिए, अज़ीमुथ में 120° की दूरी पर स्थित तीन ब्लेडों के थ्रस्ट को जोड़ना आवश्यक है। प्राथमिक गणितीय गणना से पता चलता है कि तीन या अधिक ब्लेड वाले प्रोपेलर के लिए, परिवर्तनीय घटक गायब हो जाता है और कुल जोर एक स्थिर मान बन जाता है, जो अज़ीमुथ से स्वतंत्र होता है।
यह ध्यान रखना बहुत महत्वपूर्ण है कि तिरछी उड़ाने के दौरान हब पर सख्ती से तय किए गए ब्लेड वाले रोटर का कुल जोर बल रोटेशन की धुरी के साथ मेल नहीं खाता है, लेकिन हवा के प्रवाह की ओर बढ़ने वाले ब्लेड की ओर स्थानांतरित हो जाता है। इसे इस तथ्य से समझाया गया है कि प्रवाह की ओर बढ़ने वाले ब्लेडों का उठाने वाला बल प्रवाह की दिशा में चलने वाले ब्लेडों के उठाने वाले बल से अधिक होता है, और ज्यामितीय जोड़ के परिणामस्वरूप, उठाने वाले बलों का परिणामी बल प्रवाह की दिशा में स्थानांतरित हो जाता है। ब्लेड प्रवाह की ओर बढ़ रहे हैं। मुख्य रोटर का विस्थापित थ्रस्ट बल हेलीकॉप्टर के गुरुत्वाकर्षण केंद्र के सापेक्ष एक पलटने वाला (रोलिंग) क्षण बनाता है (चित्र 1.43)। कठोरता से स्थिर ब्लेड वाला एक मुख्य रोटर अनिवार्य रूप से हेलीकॉप्टर को उलट देगा यदि उसने कोई महत्वपूर्ण आगे की गति बनाने की कोशिश की।
हीलिंग क्षण के अलावा, जो अनुदैर्ध्य अक्ष के सापेक्ष हेलीकॉप्टर को पलट देता है, मुख्य रोटर के तिरछे उड़ने के साथ, एक अनुदैर्ध्य क्षण भी उत्पन्न होता है, जो बढ़ाने के लिए अनुप्रस्थ अक्ष के सापेक्ष मुख्य रोटर के घूर्णन के विमान को मोड़ता है। हमले का कोना। इस क्षण की घटना को इस तथ्य से समझाया गया है कि 180° अज़ीमुथ के पास ब्लेड के आसपास प्रवाह की स्थिति 360° अज़ीमुथ की तुलना में बेहतर है। परिणामस्वरूप, प्रोपेलर थ्रस्ट बल के अनुप्रयोग का बिंदु रोटेशन की धुरी से आगे की ओर स्थानांतरित हो जाता है, जिससे एक सहयोगी क्षण का निर्माण होता है। लोचदार ब्लेड के अनुदैर्ध्य क्षण का परिमाण अतिरिक्त रूप से उठाने वाली ताकतों की कार्रवाई के तहत ब्लेड के ऊपर की ओर झुकने के कारण बढ़ जाता है, इस तथ्य के कारण कि आने वाला प्रवाह नीचे से 180 डिग्री के अज़ीमुथ क्षेत्र में स्थित ब्लेड पर कार्य करता है, जबकि चित्र में 1.43.
कठोरता से स्थिर ब्लेड वाले प्रोपेलर में पलटने वाले क्षण की घटना
0° अज़ीमुथ के क्षेत्र में स्थित ब्लेड शीर्ष पर है (चित्र 1.44)। पलटाव और अनुदैर्ध्य क्षणों के हानिकारक प्रभाव का उन्मूलन एक टिका हुआ निलंबन द्वारा किया जाता है
ब्लेड.
§ 6. तिरछे प्रवाह में रोटर प्रतिरोध
रोटर द्वारा प्रवाहित समतल को भार वहन करने वाली सतह माना जाता है। यह सतह आने वाले वायु प्रवाह के कारण लिफ्ट और खिंचाव पैदा करती है। मुख्य रोटर का प्रतिरोध, विंग के अनुरूप, प्रोफ़ाइल और आगमनात्मक होता है।
अक्षीय प्रवाह में, सभी अज़ीमुथ में ब्लेड का प्रोफ़ाइल प्रतिरोध समान होता है और उनका परिणाम शून्य होता है।
तिरछे प्रोफ़ाइल प्रतिरोध की उपस्थिति का भौतिक अर्थ
प्रवाह को इस प्रकार दर्शाया जा सकता है।
एक क्रांति के दौरान, ब्लेड का प्रतिरोध समय-समय पर बदलता रहता है,
अधिकतम अज़ीमुथ 90° और न्यूनतम अज़ीमुथ 270° पर पहुँचता है। "आगे बढ़ने" और "पीछे हटने" वाले ब्लेड के बीच प्रतिरोध में अंतर हेलीकॉप्टर की गति के विपरीत दिशा में निर्देशित बल देता है। यह बल मुख्य रोटर X pr का प्रोफ़ाइल प्रतिरोध है (चित्र 1.45)। मुख्य रोटर की आगमनात्मक प्रतिक्रिया को इसके द्वारा समझाया जा सकता है
उन्हीं कारणों से जैसे किसी पंख के चारों ओर बहते समय, यानी, भंवरों का निर्माण, जो प्रवाह की ऊर्जा का उपभोग करते हैं। मुख्य रोटर के ललाट प्रतिरोध में प्रोफाइल और आगमनात्मक एक्स एनवी = एक्स पीआर + एक्स इन शामिल है
मुख्य रोटर के खिंचाव का परिमाण ब्लेड के प्रोफ़ाइल आकार, उनकी स्थापना के कोण, क्रांतियों की संख्या, उड़ान की गति और मुख्य रोटर के हमले के कोण पर निर्भर करता है।
रोटेशन के मोड में उड़ान भरते समय मुख्य रोटर के ड्रैग को ध्यान में रखा जाना चाहिए।
§ 7. विपरीत प्रवाह क्षेत्र
जब ब्लेड अज़ीमुथ्स Ф = 180-:-360° में चलता है, तो बट के पास स्थित ब्लेड के खंड आक्रमण किनारे से नहीं, बल्कि प्रवाह किनारे से चारों ओर प्रवाहित होते हैं। दरअसल, अज़ीमुथ में
270° ऐसा प्रवाह घूर्णन अक्ष से ब्लेड के उस बिंदु तक स्थित ब्लेड के सभी वर्गों के आसपास होगा जिस पर v = wr, यानी उस बिंदु तक जहां परिधीय गति उड़ान गति के बराबर है (चित्र 1.46) . इन गतियों की विपरीत दिशा के कारण कुल गति
इस बिंदु के चारों ओर प्रवाह शून्य है (Wr = 0)।
φ के विभिन्न मूल्यों को देखते हुए, बाद वाले से इसे प्राप्त करना आसान है
विपरीत प्रवाह क्षेत्र के लिए अभिव्यक्तियाँ। यह सत्यापित करना आसान है कि यह क्षेत्र एक व्यास d = V/w के साथ एक वृत्त का प्रतिनिधित्व करता है, जो मुख्य रोटर द्वारा घुमाए गए डिस्क पर स्थित है (चित्र 1.46)।
विपरीत प्रवाह क्षेत्र की उपस्थिति एक नकारात्मक घटना है। इस क्षेत्र से गुजरने वाले ब्लेड का हिस्सा एक नीचे की ओर बल बनाता है, जिससे रोटर का जोर कम हो जाता है और इसमें वृद्धि होती है
ब्लेड और पूरे हेलीकॉप्टर का कंपन। जैसे-जैसे उड़ान की गति बढ़ती है, रिवर्स फ़्लो ज़ोन बढ़ता है।
रिवर्स फ्लो ज़ोन के आकार का अनुमान मुख्य रोटर ऑपरेटिंग मोड एम के विशेषताओं के गुणांक द्वारा लगाया जा सकता है
मुख्य रोटर ऑपरेटिंग मोड की विशेषताओं के गुणांक को ट्रांसलेशनल गति और परिधीय गति के अनुपात के रूप में समझा जाता है
ब्लेड के अंतिम भाग की गति।
गुणांक दर्शाता है कि ब्लेड का कौन सा भाग स्थित है
अज़ीमुथ 270°, विपरीत प्रवाह क्षेत्र में स्थित है। उदाहरण के लिए,
यदि m = 0.25, तो d = 0.25 R. इसका मतलब है कि ब्लेड का चौथा भाग विपरीत परिस्थितियों में काम करता है
चारों ओर प्रवाहित करें, और विपरीत प्रवाह क्षेत्र का व्यास रोटर त्रिज्या का 25% है।
§ 8 मुख्य रोटर से ऊर्जा हानि। सापेक्ष प्रोपेलर दक्षता
एक आदर्श प्रोपेलर (इस अध्याय के § 3) के जोर के लिए सूत्र प्राप्त करते समय, हमने सभी प्रकार के नुकसानों की उपेक्षा की। जब एक वास्तविक प्रोपेलर परिचालन स्थितियों पर काम करता है, तो इसे घुमाने के लिए आवश्यक शक्ति का लगभग 30% ब्लेड के प्रोफ़ाइल प्रतिरोध पर काबू पाने पर खर्च किया जाता है। प्रोफ़ाइल हानि का परिमाण प्रोफ़ाइल आकार और सतह की स्थिति पर निर्भर करता है।
एक आदर्श पेंच के संचालन का विश्लेषण करते हुए, हमने माना कि स्वेप्ट क्षेत्र के सभी बिंदुओं पर आगमनात्मक गति समान है। लेकिन यह सच नहीं है. ब्लेड के पास, प्रेरित वेग ब्लेड के बीच के स्थान की तुलना में अधिक होता है। इसके अलावा, अनुभाग की परिधीय गति में वृद्धि के कारण, प्रेरित गति ब्लेड के साथ बदलती है, अनुभाग त्रिज्या में वृद्धि के साथ बढ़ती है (चित्र 1.47)। इस प्रकार, रोटर द्वारा निर्मित प्रेरित गति का क्षेत्र असमान है।
वायु की निकटवर्ती धाराएँ अलग-अलग गति से चलती हैं, जिसके कारण, वायु की चिपचिपाहट के प्रभाव के कारण, प्रवाह की असमानता या आगमनात्मक हानि के कारण आवश्यक शक्ति का लगभग 6% नुकसान होता है। इन नुकसानों को कम करने का एक तरीका ब्लेडों को ज्यामितीय रूप से मोड़ना है।
मुख्य रोटर न केवल हवा का एक द्रव्यमान बाहर फेंकता है, जिससे जोर पैदा होता है, बल्कि जेट भी घूमता है। जेट घूमने से होने वाली हानि प्रोपेलर को आपूर्ति की गई बिजली का लगभग 0.2% है।
रोटर के घूर्णन तल के नीचे और ऊपर दबाव में अंतर के कारण, हवा रोटर डिस्क की परिधि के साथ नीचे से ऊपर की ओर बहती है। इस कारण से, मुख्य रोटर द्वारा घुमाए गए विमान की परिधि के चारों ओर स्थित एक निश्चित संकीर्ण वलय जोर के निर्माण में भाग नहीं लेता है (चित्र 1.48)। ब्लेड के बट हिस्से, जहां लगाव बिंदु स्थित हैं, भी कर्षण बल के निर्माण में भाग नहीं लेते हैं। कुल मिलाकर, अंत और बट हानि आवश्यक शक्ति का लगभग 3% है।
सूचीबद्ध हानियों की उपस्थिति के कारण, एक वास्तविक प्रोपेलर को घुमाने के लिए आवश्यक शक्ति, एक आदर्श प्रोपेलर के जोर के बराबर जोर पैदा करती है, अधिक होती है।
न्यूनतम नुकसान सुनिश्चित करने के दृष्टिकोण से यह या वह वास्तविक प्रोपेलर कितना सफल है, इसका अंदाजा लगाया जा सकता है
मुख्य रोटर की सापेक्ष दक्षता के अनुसार जी| 0, जो हवा को अस्वीकार करने और दिए गए जोर को उत्पन्न करने के लिए आवश्यक शक्ति का एक वास्तविक प्रोपेलर को घुमाने पर खर्च की गई शक्ति से समान जोर पैदा करने का अनुपात है।
§ 9. रोटर ब्लेड का हिंग वाला सस्पेंशन
इस अध्याय के § 2 में, यह बताया गया था कि रोटर्स में अक्षीय टिका होता है, जो उड़ान में प्रोपेलर की पिच को बदलने का काम करता है। पिच में परिवर्तन ब्लेड को अक्षीय टिका के चारों ओर घुमाकर प्राप्त किया जाता है? = 0-15°. अक्षीय टिका के अलावा, स्क्रू में क्षैतिज और ऊर्ध्वाधर टिका होता है।
क्षैतिज काज (एचएस) ब्लेड को ऊर्ध्वाधर विमान में विक्षेपित करने की अनुमति देता है। करने के लिए धन्यवाद
यह काज ब्लेड को प्रवाह के विपरीत चलने पर ऊपर की ओर और प्रवाह की दिशा में जाने पर नीचे की ओर झूलने की अनुमति देता है। इस प्रकार, क्षैतिज काज ब्लेड को फड़फड़ाने की गति करने की अनुमति देता है।
ब्लेड की धुरी और प्रोपेलर हब के तल के बीच के कोण को फ़्लैपिंग कोण कहा जाता है। कांग्रेस
संरचनात्मक रूप से, क्षैतिज काज के सापेक्ष ब्लेड का विक्षेपण स्टॉप (तक) द्वारा सीमित होता है
25-30°, नीचे 4-8°)। उड़ान में फ़्लैपिंग आंदोलनों की उपस्थिति के बावजूद, ब्लेड स्टॉप को नहीं छूता है, क्योंकि फ़्लैपिंग कोणों की सीमा स्टॉप के बीच के कोण से कम है। ब्लेड केवल तभी रुकता है जब गति में भारी गिरावट होती है, और तदनुसार, जब ब्लेड के केन्द्रापसारक बल में अस्वीकार्य कमी होती है।
जब हेलीकॉप्टर खड़ा होता है, जब मुख्य रोटर घूमता नहीं है या कम गति पर घूमता है, तो ब्लेड के सिरे उनके वजन के कारण नीचे झुक जाते हैं, और यदि ब्लेड निचले स्टॉप पर टिक जाता है, तो टेल बूम या धड़ को झटका लगता है। संभव। इसलिए, निचले स्टॉप के अलावा, एक विशेष ओवरहैंग लिमिटर भी होता है, जो कम गति पर ब्लेड को अत्यधिक नीचे जाने और हेलीकॉप्टर से टकराने से रोकता है।
जैसे-जैसे गति बढ़ती है, जब वायुगतिकीय बल ब्लेड के सिरों को ऊपर की ओर झुकाते हैं, तो ओवरहैंग लिमिटर बंद हो जाता है, जिसके बाद ब्लेड नीचे के स्टॉप तक फड़फड़ाने की गति कर सकता है।
ऊर्ध्वाधर काज (वीएच) विमान में झाड़ी के सापेक्ष ब्लेड के विक्षेपण को सुनिश्चित करता है
पेंच का घूमना. नीचे दिखाया जाएगा कि जब मुख्य रोटर घूमता है, तो ब्लेड तटस्थ (रेडियल) स्थिति से एक निश्चित कोण पर पीछे या आगे बढ़ सकता है। इस कोण को लैग (अग्रिम) कोण कहा जाता है और इसे ? अक्षर से दर्शाया जाता है। इस कोण का परिमाण स्टॉप द्वारा सीमित है। ब्लेड वापस घूम सकता है? =10-:-18° और आगे? = 6-:-8°*.
क्षैतिज और ऊर्ध्वाधर टिका की उपस्थिति भार-वहन के संचालन में एक महत्वपूर्ण परिवर्तन लाती है
पेंच
* तकनीकी विवरणों में, लैग (अग्रिम) कोण का मान ब्लेड की रेडियल स्थिति के सापेक्ष नहीं, बल्कि क्षैतिज काज के लंबवत के सापेक्ष दिया जाता है।
25
सबसे पहले, इस तथ्य के कारण तथाकथित शंकु (ट्यूलिप) के गठन पर ध्यान देना आवश्यक है कि उठाने वाले बलों की कार्रवाई के तहत ब्लेड क्षैतिज टिका के सापेक्ष विचलित हो जाते हैं और हब के घूर्णन के विमान से ऊपर उठते हैं। दूसरे, फड़फड़ाहट आंदोलनों के कारण, विभिन्न अज़ीमुथों में ब्लेड की उठाने वाली ताकतें बराबर हो जाती हैं, जिससे आगे की उड़ान के दौरान हेलीकॉप्टर के रोलओवर और पिचिंग को खत्म करना संभव हो जाता है। अंत में, ब्लेड के बट अनुभागों को बड़े झुकने वाले क्षणों से हटा दिया जाता है जो तब होता है जब ब्लेड कठोरता से एम्बेडेड होते हैं।
§ 10. क्षैतिज काज (एचएस)
आइए हम क्षैतिज काज के सापेक्ष ब्लेड के संतुलन पर विचार करें, अर्थात, ब्लेड पर लगने वाले बल
घूर्णन के तल के लंबवत तल में मुँह (चित्र 1.49)।
इस तल में, निम्नलिखित बल ब्लेड पर कार्य करते हैं: (Gl - भार; Yl - उठाने वाला बल; Fc. b -
अपकेन्द्रीय बल।
उठाने का बल ब्लेड के वजन का 10-15 गुना होता है। सबसे बड़ा केन्द्रापसारक बल है, जो ब्लेड के वजन से 100-150 गुना अधिक है। संतुलन स्थिति में, मुख्य शाफ्ट के सापेक्ष ब्लेड पर कार्य करने वाले सभी बलों के क्षणों का योग शून्य के बराबर होना चाहिए। दूसरे शब्दों में, इन बलों के परिणाम को मुख्य शाफ्ट की धुरी से गुजरना होगा।
घूमते समय, ब्लेड एक शंकु के करीब की सतह का वर्णन करता है, और इसलिए फ़्लैपिंग कोण को टेपर कोण कहा जाता है।
अक्षीय प्रवाह, निरंतर पिच और क्रांतियों के साथ, कोण मान
टेपर बिल्कुल निश्चित है. यदि, उदाहरण के लिए, आप वृद्धि करते हैं
ब्लेड की पिच, फिर उठाने वाले बल से बढ़े हुए क्षण के प्रभाव में ब्लेड फ़्लैपिंग कोण को बढ़ाने की दिशा में विचलित होना शुरू हो जाएगा।
जैसे-जैसे स्विंग कोण बढ़ता है, वैसे-वैसे आघूर्ण भी बढ़ता है
केन्द्रापसारक बल जो ब्लेड को विक्षेपित होने से रोकता है, और जब संतुलन पुनः स्थापित होता है, तो ब्लेड एक बड़े फड़फड़ाहट कोण के साथ घूमेगा।
0-180° के अज़ीमुथ में तिरछे प्रवाह में, ब्लेड प्रवाह की ओर बढ़ता है, और 180-360° के अज़ीमुथ में - प्रवाह की दिशा में। प्रवाह की ओर बढ़ने वाले ब्लेड को उठाने वाले बल में वृद्धि प्राप्त होती है और ऊपर की ओर फड़फड़ाती है, क्योंकि उठाने वाले बल का क्षण केन्द्रापसारक बल के क्षण से अधिक हो जाता है (वजन बल के क्षण को इसके छोटे मूल्यों के कारण उपेक्षित किया जाता है)।
प्रवाह की दिशा में चलने वाले ब्लेड पर, लिफ्ट बल कम हो जाता है, और क्षण के प्रभाव में
केन्द्रापसारक बल के कारण यह नीचे की ओर फड़फड़ाता है। इस प्रकार, एक चक्कर में ब्लेड ऊपर की ओर घूम जाता है और
नीचे झूलो.
प्रवाह वेग अज़ीमुथ 90° पर सबसे अधिक होता है, और इसलिए लिफ्ट में वृद्धि यहाँ सबसे अधिक होती है।
सबसे कम लिफ्ट बल अज़ीमुथ 270° पर होगा, जहां प्रवाह वेग न्यूनतम है और विपरीत प्रवाह क्षेत्र का प्रभाव सबसे अधिक स्पष्ट है। हालाँकि, मुख्य शाफ्ट की उपस्थिति और ब्लेड के फड़फड़ाने की गतिविधियों के कारण, संकेतित अज़ीमुथ में उठाने वाले बलों में वृद्धि और कमी अपेक्षाकृत कम है। इसे फड़फड़ाते ब्लेडों के आक्रमण के कोणों में परिवर्तन द्वारा समझाया गया है। दरअसल, जब ब्लेड ऊपर की ओर फड़फड़ाता है, तो हमले का कोण कम हो जाता है, और जब ब्लेड नीचे की ओर फड़फड़ाता है, तो यह बढ़ जाता है (चित्र 1.50)। इस कारण से, अज़ीमुथ में उठाने वाली ताकतों का परिमाण बराबर हो जाता है, जो हेलीकॉप्टर पर अभिनय करने वाले हीलिंग और अनुदैर्ध्य क्षणों को व्यावहारिक रूप से समाप्त कर देता है।
परिणामस्वरूप, यह कहा जाना चाहिए कि क्षैतिज टिका का उद्देश्य सभी अज़ीमुथों में ब्लेड की उठाने वाली ताकतों को बराबर करना और बट वर्गों को झुकने वाले क्षणों से उतारना है। क्षैतिज टिकाएं संरचनात्मक रूप से प्रोपेलर के घूर्णन अक्ष से एक निश्चित दूरी Lgsh (छवि 1.51) से दूरी पर होती हैं। अक्षीय प्रवाह में, घूर्णन शंकु की धुरी और आस्तीन की धुरी संपाती होती है। इसलिए, मुख्य शाफ्ट पर सशर्त रूप से लागू एफसीबी ब्लेड के केन्द्रापसारक बल परस्पर संतुलित होते हैं। तिरछे प्रवाह में, शंकु की धुरी और आस्तीन की धुरी मेल नहीं खाती है और केन्द्रापसारक बल अलग-अलग (समानांतर) विमानों में स्थित होते हैं। एक निश्चित भुजा c पर ये बल एक क्षण M g. w = FcbS बनाते हैं, जो हेलीकॉप्टर की नियंत्रणीयता में सुधार करता है। इसके अलावा, जब हेलीकॉप्टर गलती से अनुदैर्ध्य या अनुप्रस्थ अक्ष के सापेक्ष विक्षेपित हो जाता है, तो इस क्षण पर एक अवमंदन प्रभाव पड़ता है, अर्थात, यह विक्षेपण के विपरीत दिशा में निर्देशित होता है, जिससे हेलीकॉप्टर की स्थिरता में सुधार होता है।
§ 11. तिरछी उड़ान के दौरान घूर्णन के शंकु का पतन
पिछले पैराग्राफ में यह संकेत दिया गया था कि क्षैतिज टिकाओं की उपस्थिति के कारण, ब्लेड अज़ीमुथ में 0-180° में ऊपर की ओर और 180-360° में अज़ीमुथ में नीचे की ओर झूलते हैं। हकीकत में, ब्लेड के फड़फड़ाने की गति की तस्वीर कुछ अधिक जटिल लगती है। इस तथ्य के कारण कि ब्लेड में द्रव्यमान होता है, कोण में वृद्धि होती है
जड़ता द्वारा फड़फड़ाना अज़ीमुथ 180° तक नहीं, बल्कि कुछ हद तक आगे तक जारी रहता है, कमी - 360° तक नहीं, और कुछ हद तक आगे भी। इसके अलावा, 180° अज़ीमुथ के पास हवा का प्रवाह नीचे से ब्लेड की ओर बहता है, और 360° अज़ीमुथ के पास ऊपर से, जो 180° अज़ीमुथ के पास फ़्लैपिंग कोण में निरंतर वृद्धि और 360° अज़ीमुथ के पास फ़्लैपिंग कोण में कमी में भी योगदान देता है।
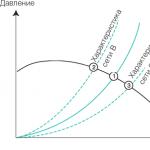
चित्र 1.52ए बी-1 स्थापना पर प्राप्त दिगंश पर फ़्लैपिंग कोण की निर्भरता का प्रयोगात्मक वक्र दिखाता है। 20 मीटर/सेकंड की तिरछी ब्लोइंग गति पर कठोर ब्लेड वाले मुख्य रोटर के परीक्षण किए गए मॉडल के लिए, अधिकतम फ़्लैपिंग कोण अज़ीमुथ 196° में था, और न्यूनतम फ़्लैपिंग कोण अज़ीमुथ 22° में था। इसका मतलब है कि घूर्णन शंकु की धुरी पीछे और बायीं ओर झुकी हुई है। तिरछे प्रवाह के दौरान रोटर के घूर्णन शंकु के अक्ष के विचलन की घटना को घूर्णन शंकु की रुकावट कहा जाता है (चित्र 1.53)।
सैद्धांतिक रूप से, मुख्य रोटर शंकु तिरछी उड़ाने के दौरान पीछे और बाईं ओर झुक जाता है। उपरोक्त प्रयोग से इस रुकावट की पुष्टि होती है। हालाँकि, पार्श्व पतन की दिशा ब्लेड के विरूपण और क्षैतिज टिका के पृथक्करण से काफी प्रभावित होती है। वास्तविक मुख्य रोटर ब्लेड में पर्याप्त कठोरता नहीं होती है और यह उस पर कार्य करने वाली शक्तियों से प्रभावित होता है।
27
गंभीर रूप से विकृत - मुड़ता और मुड़ता है। मोड़ हमले के घटते कोणों की दिशा में होता है, और इसलिए ऊपर की ओर झुकाव पहले रुक जाता है (Ф = 160°)। तदनुसार, नीचे की ओर झुकाव भी पहले रुक जाता है (φ = 340°)।
चित्र 1.52, बी, वी-2 स्थापना पर प्राप्त दिगंश पर स्विंग कोण ए की निर्भरता का प्रयोगात्मक वक्र दिखाता है। लचीले ब्लेड वाले प्रोपेलर मॉडल का परीक्षण करते समय, अधिकतम फ़्लैपिंग कोण अज़ीमुथ φ = 170° पर प्राप्त किया गया था, और न्यूनतम फ़्लैपिंग कोण अज़ीमुथ φ = 334° पर प्राप्त किया गया था। इस प्रकार, वास्तविक हेलीकाप्टरों में घूर्णन शंकु पीछे और दाईं ओर झुका होता है। स्टॉल कोण का मान उड़ान की गति, प्रोपेलर पिच और आरपीएम पर निर्भर करता है। प्रोपेलर पिच और गति में वृद्धि के साथ और गति में कमी के साथ, रोटेशन के शंकु का शाफ्ट बढ़ता है।
आधुनिक हेलीकॉप्टरों को हेलीकॉप्टर की गति की दिशा में घूर्णन शंकु को झुकाकर नियंत्रित किया जाता है। उदाहरण के लिए, आगे बढ़ने के लिए, पायलट रोटर शंकु की धुरी को आगे की ओर झुकाता है (स्वैशप्लेट का उपयोग करके)। शंकु का झुकाव मुख्य रोटर थ्रस्ट के संबंधित दिशा में झुकाव के साथ होता है, जो हेलीकॉप्टर को स्थानांतरित करने के लिए आवश्यक घटक प्रदान करता है (चित्र 1.32)। हालाँकि, जैसे ही उड़ान की गति बढ़ने लगती है, तिरछे प्रवाह के कारण शंकु पीछे और किनारे पर गिर जाता है। शंकु पतन के प्रभाव को हेलीकॉप्टर नियंत्रण छड़ी के अतिरिक्त आंदोलन द्वारा प्रतिसाद दिया जाता है।
§ 12. लंबवत काज (वीएच)
यह सुनिश्चित करने के लिए कि क्षैतिज के अतिरिक्त ऊर्ध्वाधर गेंद भी स्थापित करना आवश्यक है-
निर, घूर्णन के तल में ब्लेड पर कार्य करने वाले बलों पर विचार करें।
जब प्रोपेलर घूमता है, तो घूर्णन के तल में इसके ब्लेड पर घूर्णी प्रतिरोध बल Q l कार्य करता है। होवरिंग मोड में, ये बल सभी अज़ीमुथ में समान होंगे। जब प्रोपेलर के चारों ओर एक तिरछा प्रवाह होता है, तो प्रवाह की ओर बढ़ने वाले ब्लेड का प्रतिरोध प्रवाह की दिशा में चलने वाले ब्लेड की तुलना में अधिक होता है। क्षैतिज टिकाओं की उपस्थिति और ब्लेडों की फड़फड़ाहट गति इस अंतर को कम करने में मदद करती है (हमले के कोणों को बराबर करने के कारण), लेकिन इसे पूरी तरह से समाप्त नहीं करती है। इसलिए, घूर्णी प्रतिरोध बल एक परिवर्तनशील बल है जो ब्लेड के मूल भागों को लोड करता है।
जब गति बदलती है, तो जड़त्वीय बल मुख्य रोटर ब्लेड पर कार्य करते हैं; जब गति बढ़ती है, तो उन्हें घूर्णन के विरुद्ध निर्देशित किया जाता है, और जब गति कम होती है, तो उन्हें रोटर के घूर्णन की ओर निर्देशित किया जाता है। रोटर डिस्क में बहने वाली हवा के असमान प्रवाह के कारण रोटर हब के निरंतर घुमाव पर जड़त्वीय बल भी उत्पन्न हो सकते हैं, जिससे वायुगतिकीय बलों में परिवर्तन होता है और ब्लेड की हब के सापेक्ष गति करने की अतिरिक्त प्रवृत्ति होती है। उड़ान में, जड़त्वीय बल अपेक्षाकृत छोटे होते हैं। हालाँकि, जमीन पर इस समय वाहक घूमना शुरू कर देता है
प्रोपेलर की जड़त्वीय शक्तियाँ बड़े मूल्य तक पहुँचती हैं और, यदि ट्रांसमिशन अचानक चालू हो जाता है, तो ब्लेड भी टूट सकते हैं।
इसके अलावा, क्षैतिज टिका की उपस्थिति जो ब्लेड के फड़फड़ाने की गति प्रदान करती है, इस तथ्य की ओर ले जाती है कि ब्लेड के गुरुत्वाकर्षण का केंद्र समय-समय पर प्रोपेलर के रोटेशन की धुरी के करीब पहुंचता है और दूर चला जाता है (चित्र 1.54)।
ऊर्जा संरक्षण के नियम के आधार पर, घूमते हुए वाहक की गतिज ऊर्जा
ब्लेड की फड़फड़ाहट गति की परवाह किए बिना प्रोपेलर को स्थिर रहना चाहिए (अन्य प्रकार की ऊर्जा में परिवर्तन की उपेक्षा की जाती है)। घूमने वाले प्रोपेलर की गतिज ऊर्जा सूत्र द्वारा निर्धारित की जाती है:
जहाँ m घूमने वाले ब्लेड का द्रव्यमान है;
डब्ल्यू
ब्लेड के घूमने की कोणीय गति,
जी-रोटेशन के अक्ष से ब्लेड के गुरुत्वाकर्षण के केंद्र तक की दूरी;
सूत्र से पता चलता है कि निरंतर गतिज ऊर्जा पर, ब्लेड के गुरुत्वाकर्षण के केंद्र के रोटेशन की धुरी (ऊपर की ओर झूलना) के दृष्टिकोण के साथ रोटेशन के कोणीय वेग में वृद्धि होनी चाहिए, और गुरुत्वाकर्षण के केंद्र को हटा दिया जाना चाहिए घूर्णन की धुरी से ब्लेड (नीचे की ओर झूलना) के साथ घूर्णन के कोणीय वेग में कमी होनी चाहिए। यह घटना नर्तकियों के लिए अच्छी तरह से जानी जाती है जो अपनी भुजाओं को तेजी से अपने शरीर के करीब लाकर अपने शरीर के घूमने की गति को बढ़ाते हैं (चित्र 1.55)। वे बल जिनके प्रभाव में घूर्णन प्रणाली की जड़ता के क्षण में परिवर्तन होने पर घूर्णन का कोणीय वेग बढ़ता या घटता है, कोरिओलिस कहलाते हैं।
जब ब्लेड ऊपर की ओर फड़फड़ाते हैं, तो कोरिओलिस बल मुख्य रोटर के घूमने की दिशा में निर्देशित होते हैं, और जब ब्लेड नीचे की ओर फड़फड़ाते हैं, तो वे इसके विरुद्ध निर्देशित होते हैं।
फड़फड़ाहट आंदोलनों के दौरान उत्पन्न होने वाली कोरिओलिस ताकतें महत्वपूर्ण मूल्यों तक पहुंचती हैं और ब्लेड के मूल भागों को चर के साथ लोड करती हैं
मुख्य रोटर के घूर्णन के तल में अभिनय करने वाले झुकने वाले क्षण।
इस प्रकार, क्षैतिज टिका की स्थापना, जिसने अनुमति दी
प्रोपेलर हब में झुकने वाले क्षणों के स्थानांतरण को खत्म करें और फ़्लैपिंग विमान में ब्लेड के बट हिस्सों को उतार दें, साथ ही कोरिओलिस बलों की घटना से जुड़ी अवांछनीय घटनाएं पैदा होती हैं जो ब्लेड के मूल हिस्सों को एक परिवर्तनीय क्षण के साथ लोड करती हैं घूर्णन का तल. कोरिओलिस बलों से प्रत्यावर्ती क्षण मुख्य शाफ्ट बीयरिंग, मुख्य रोटर हब और इंजन शाफ्ट तक प्रेषित होता है, जिससे वैकल्पिक भार उत्पन्न होता है, जिससे मुख्य मुख्य बीयरिंग और कंपन में तेजी आती है।
हेलीकॉप्टर।
रोटेशन के विमान में अभिनय करने वाले वैकल्पिक झुकने वाले क्षणों से ब्लेड के मूल हिस्सों को उतारने के लिए, और हेलीकाप्टर के कंपन पैदा करने वाले वैकल्पिक भार से झाड़ियों को उतारने के लिए, ऊर्ध्वाधर टिकाएं स्थापित की जाती हैं, जो रोटर के रोटेशन के विमान में दोलन संबंधी गति प्रदान करती हैं। ब्लेड
विचारित बलों के अलावा, घूर्णन के तल में केन्द्रापसारक बल भी ब्लेड पर कार्य करता है।
एक ऊर्ध्वाधर काज और मोड में आने वाले वायु प्रवाह के एक समान वेग क्षेत्र की उपस्थिति में
घूमने वाला ब्लेड एक निश्चित कोण से रेडियल स्थिति से पीछे रहता है? चित्र 1.56 क्षणों की समानता द्वारा निर्धारित अंतराल कोण का परिमाण दिखाता है:
Fts.bLts.b =Ql LQ.
अनुवादात्मक गति के साथ उड़ान में संक्रमण करते समय, वायुगतिकीय बलों में परिवर्तनशील जड़त्वीय और कोरिओलिस बल जुड़ जाते हैं, और वायुगतिकीय बल स्वयं भी परिवर्तनशील हो जाते हैं। इन बलों के प्रभाव में, ब्लेड एक जटिल गति करता है, जिसमें एक घूर्णी गति, ट्रांसलेशनल (हेलीकॉप्टर के साथ), मुख्य शाफ्ट के सापेक्ष एक फ्लाईव्हील और मुख्य शाफ्ट के सापेक्ष एक दोलन गति शामिल होती है।
यदि कोई वीएससी है, तो ब्लेड घूमता है
कुछ अंतराल कोण? (चित्र 1.57, ए)। इस मामले में, ब्लेड को इस तरह से तैनात किया जाता है कि वायुगतिकीय और केन्द्रापसारक बलों एन का परिणाम इसकी धुरी के साथ निर्देशित हो। परिणामी को मुख्य शाफ्ट अक्ष पर स्थानांतरित करके और इसे बलों ए और बी में विभाजित करके, हम यह सुनिश्चित करते हैं कि मुख्य शाफ्ट बीयरिंग समान रूप से लोड न हों। वास्तव में, एक बल A की उपस्थिति में, कैसे
आगे और पीछे के जीएसएच बियरिंग्स को समान रेडियल लोड के साथ लोड किया जाएगा। हालाँकि, ताकत
बी, पीछे के बेयरिंग को उतारकर, आगे के बेयरिंग को अतिरिक्त रूप से लोड करता है, जिससे बेयरिंग में असमान घिसाव होता है। इसके अलावा, बल बी, जो जीएस के लिए अक्षीय है, को थ्रस्ट बीयरिंग की स्थापना की आवश्यकता होती है।
मुख्य बीयरिंगों की परिचालन स्थितियों को सममित भार की स्थितियों के करीब लाने के लिए, एक विस्थापन लागू किया जाता है
झाड़ी के सापेक्ष मुख्य शाफ्ट घूर्णन में आगे की ओर है (चित्र 1.57, बी)। इस मामले में, क्या कोई अंतराल कोण है?
इस तथ्य की ओर जाता है कि ब्लेड अक्ष मुख्य शाफ्ट अक्ष के लगभग लंबवत स्थित है।
चूंकि ऊर्ध्वाधर टिकाएं ब्लेड को मुख्य रोटर के घूर्णन के विमान में दोलन संबंधी गतिविधियां करने की अनुमति देती हैं, इसलिए रोटर पर इन कंपनों के आयाम को बढ़ाने की संभावना को रोका जा सकता है।
आधुनिक हेलीकॉप्टरों के रोटर विशेष डैम्पर्स - कंपन डैम्पर्स से सुसज्जित हैं। डैम्पर्स या तो घर्षणात्मक या हाइड्रोलिक होते हैं। दोनों के संचालन का सिद्धांत कंपन ऊर्जा को तापीय ऊर्जा में परिवर्तित करना है, जिसे बाद में आसपास के स्थान में नष्ट कर दिया जाता है।
जमीन पर, इंजन शुरू करने और मुख्य रोटर को घुमाने से पहले, इसके ब्लेड को प्रोपेलर के सामने के समर्थन पर रखा जाना चाहिए। यह घूर्णन के प्रारंभिक क्षण में ब्लेड के कोणीय त्वरण (जड़ता बल) को कम करने के लिए किया जाता है।
प्रोपेलर के सापेक्ष ब्लेड के असमान घुमाव से मुख्य रोटर के गुरुत्वाकर्षण के केंद्र का रोटेशन की धुरी से विस्थापन होता है। परिणामस्वरूप, जब प्रोपेलर घूमता है, तो एक जड़त्वीय बल उत्पन्न होता है, जिससे हेलीकॉप्टर में कंपन (डगमगाना) होता है।
जब मुख्य रोटर जमीन पर काम करता है तो यह घटना एक विशेष खतरा पैदा करती है, क्योंकि एक लोचदार चेसिस पर हेलीकॉप्टर की प्राकृतिक आवृत्ति ड्राइविंग बल की आवृत्ति के बराबर या उससे अधिक हो सकती है, जिससे कंपन होता है जिसे आमतौर पर जमीन कहा जाता है प्रतिध्वनि.
§ 13. स्विंग मुआवजा
जैसा कि ज्ञात है, रोटर शंकु के ढहने का मुख्य कारण तिरछे प्रवाह के दौरान ब्लेड की फड़फड़ाहट की गति है। अधिकतम उर्ध्व झुकाव कोण जितना अधिक होगा, घूर्णन के शंकु का पतन उतना ही अधिक होगा। शंकु की एक बड़ी रुकावट की उपस्थिति अवांछनीय है, क्योंकि आगे की उड़ान में हेलीकॉप्टर को नियंत्रित करते समय बाधा की भरपाई के लिए कमांड लीवर के अतिरिक्त विक्षेपण की आवश्यकता होती है। इसलिए, यह आवश्यक है कि मुख्य शाफ्ट के सापेक्ष क्षणों का संतुलन स्विंग आंदोलनों के एक छोटे आयाम पर स्थापित किया जाए।
यह सुनिश्चित करने के लिए कि स्विंग आंदोलनों का आयाम सहनशीलता के भीतर है, स्विंग मुआवजे का उपयोग किया जाता है। फ़्लैपिंग क्षतिपूर्ति का सिद्धांत यह है कि नियंत्रण बांह अनुलग्नक बिंदु (ए) क्षैतिज काज की धुरी पर स्थापित नहीं है, बल्कि ब्लेड की ओर स्थानांतरित हो गया है (चित्र 1.58)।
यदि बिंदु ए क्षैतिज काज की धुरी पर स्थित नहीं है और गतिहीन है, तो ऊपर की ओर झूलते समय, स्थापना का कोण, और इसलिए ब्लेड के हमले का कोण कम हो जाता है, और नीचे की ओर झूलते समय, यह बढ़ जाता है। ब्लेड के फड़फड़ाने पर हमले के कोणों में परिवर्तन के कारण, वायुगतिकीय बल उत्पन्न होते हैं जो फड़फड़ाने की गति के आयाम में वृद्धि को रोकते हैं।
मुआवज़े की प्रभावशीलता काफी हद तक टैन ?1 (चित्र 1.58) पर निर्भर करती है, जिसे फ़्लैपिंग मुआवज़ा विशेषता कहा जाता है। जितना अधिक टैन ?1, उतना अधिक कोण जिससे ब्लेड स्थापना कोण फ़्लैपिंग के दौरान बदलता है। नतीजतन, जैसे-जैसे टैन ?1 बढ़ता है, फ़्लैपिंग मुआवजे की दक्षता बढ़ती है।
क्या कोई लैग कोण है? ऊर्ध्वाधर काज स्थापित करते समय, यह फ्लाईव्हील के आयाम को बढ़ा सकता है
हरकतें (चित्र 1.59)। जब ब्लेड प्रोपेलर के चारों ओर एक कोण से विक्षेपित होता है? अग्रणी किनारा (बिंदु ए) अनुगामी किनारे (बिंदु बी) की तुलना में मुख्य बंदूक से अधिक दूर होगा। इसलिए, फड़फड़ाते समय, बिंदु A का पथ बिंदु B द्वारा तय किए गए पथ से अधिक होता है, जिसके परिणामस्वरूप, जब ऊपर की ओर फड़फड़ाते हैं, तो ब्लेड के हमले का कोण बढ़ जाता है, और जब नीचे की ओर फड़फड़ाते हैं, तो ब्लेड के हमले का कोण बढ़ जाता है। ब्लेड कम हो जाता है.
इस प्रकार, लैग कोण ब्लेड पर अतिरिक्त वायुगतिकीय बलों की उपस्थिति में योगदान देगा, जो फड़फड़ाने वाले आंदोलनों के आयाम को बढ़ाएगा। इसलिए, ऊर्ध्वाधर काज के साथ ब्लेड के फड़फड़ाने के लिए मुआवजे का उपयोग करना विशेष रूप से उचित है।
§ 14. रोटर टॉर्क
जब मुख्य रोटर घूमता है, तो वायु प्रतिरोध बल उसके ब्लेड पर कार्य करते हैं, जो रोटर अक्ष के सापेक्ष घूर्णन के प्रतिरोध का एक क्षण बनाते हैं। इस क्षण पर काबू पाने के लिए, धड़ में स्थापित इंजन से यांत्रिक रूप से संचालित हेलीकॉप्टरों पर मुख्य रोटर शाफ्ट को टॉर्क की आपूर्ति की जाती है। टॉर्क को मुख्य गियरबॉक्स के माध्यम से मुख्य रोटर शाफ्ट तक प्रेषित किया जाता है। यांत्रिकी के तीसरे नियम (क्रिया और प्रतिक्रिया की समानता का नियम) के अनुसार, एक प्रतिक्रियाशील टोक़ उत्पन्न होता है, जो मुख्य गियरबॉक्स अनुलग्नक बिंदुओं के माध्यम से हेलीकॉप्टर के धड़ तक प्रेषित होता है और इसे टोक़ के विपरीत दिशा में घुमाता है। टोक़ और प्रतिक्रियाशील टोक़, प्रोपेलर के ऑपरेटिंग मोड की परवाह किए बिना, हमेशा परिमाण में बराबर और दिशा में विपरीत होते हैं एमकेआर = श्रीमान।
यदि मोटरें स्वयं ब्लेड पर लगाई गई हैं, तो यह स्पष्ट है कि कोई प्रतिक्रिया बलाघूर्ण नहीं है। रिएक्टिव
मुख्य रोटर के सेल्फ-रोटेटिंग मोड में भी कोई टॉर्क नहीं होता है, यानी सभी मामलों में जब टॉर्क
धड़ में स्थापित इंजन से टॉर्क मुख्य रोटर शाफ्ट तक प्रेषित नहीं होता है।
यह पहले कहा गया था कि यांत्रिक ड्राइव के साथ एकल-रोटर हेलीकॉप्टरों पर प्रतिक्रिया टोक़ का संतुलन हेलीकॉप्टर के गुरुत्वाकर्षण के केंद्र के सापेक्ष टेल रोटर थ्रस्ट द्वारा बनाए गए क्षण द्वारा किया जाता है।
ट्विन-रोटर हेलीकॉप्टरों में, दोनों मुख्य रोटरों के प्रतिक्रिया क्षणों का मुआवजा रोटर्स को अलग-अलग दिशाओं में घुमाकर प्राप्त किया जाता है। इसके अलावा, दोनों स्क्रू के विपरीत दिशा में प्रतिक्रियाशील क्षणों की समानता बनाए रखने के लिए, स्क्रू को उनके क्रांतियों के सटीक सिंक्रनाइज़ेशन के साथ बिल्कुल समान बनाया जाता है।
मुख्य रोटर को प्रेषित शक्ति बराबर होती है
सूत्र से यह स्पष्ट है कि रोटर की गति जितनी कम होगी, टॉर्क उतना ही अधिक होगा, और परिणामस्वरूप
वैध और प्रतिक्रियाशील.
एक हेलीकॉप्टर के मुख्य रोटर के चक्करों की संख्या एक विमान प्रोपेलर के चक्करों की संख्या से काफी कम है। इसलिए, समान इंजन शक्ति के साथ, हेलीकॉप्टर रोटर का प्रतिक्रियाशील टॉर्क विमान रोटर की तुलना में काफी अधिक होता है।
मुख्य रोटर थ्रस्ट के परिमाण के आधार पर टॉर्क और प्रतिक्रियाशील क्षण भी भिन्न होते हैं। उदाहरण के लिए, प्रोपेलर के प्रणोद बल को बढ़ाने के लिए, समग्र पिच को बढ़ाना आवश्यक है। प्रोपेलर पिच में वृद्धि के साथ-साथ इसके घूर्णन के प्रतिरोध के क्षण में भी वृद्धि होती है। इसलिए, जैसे-जैसे प्रोपेलर पिच बढ़ती है, प्रोपेलर को आपूर्ति किए गए टॉर्क को बढ़ाना आवश्यक होता है। यदि ऐसा नहीं किया जाता है, तो मुख्य रोटर के घुमावों की संख्या कम हो जाएगी, जिससे मुख्य रोटर का जोर कम हो जाएगा।
इसलिए, रोटर थ्रस्ट को बढ़ाने के लिए न केवल प्रोपेलर पिच, बल्कि टॉर्क को भी बढ़ाना आवश्यक है। इस उद्देश्य के लिए, पायलट के कॉकपिट में एक "स्टेप-थ्रोटल" लीवर स्थापित किया जाता है, जो किनेमेटिक रूप से इंजन से जुड़ा होता है और एक तंत्र होता है जो प्रोपेलर की पिच को बदलता है। जब लीवर चलता है, तो स्क्रू के टॉर्क और पिच में आनुपातिक परिवर्तन होता है और साथ ही प्रतिक्रियाशील टॉर्क में भी परिवर्तन होता है। एकल-रोटर हेलीकॉप्टर पर, प्रतिक्रिया टॉर्क में बदलाव के लिए टर्न को खत्म करने के लिए टेल रोटर थ्रस्ट में संबंधित बदलाव की आवश्यकता होती है।
§ 15. टेल रोटर थ्रस्ट बल
टेल रोटर थ्रस्ट का परिमाण (चित्र 1.60) समानता से निर्धारित किया जा सकता है
प्रोपेलर द्वारा खपत की गई शक्ति कम हो जाएगी, और परिणामस्वरूप, टेल रोटर द्वारा निर्मित आवश्यक जोर बढ़ जाएगा।
टेल रोटर तिरछी ब्लोइंग परिस्थितियों में काम करता है, क्योंकि उड़ान में इसके घूमने का तल आने वाले प्रवाह की दिशा के लंबवत नहीं होता है।
जब किसी कठोर प्रोपेलर को तिरछा उड़ाया जाता है, तो उस पर प्रवाह की बदलती गति प्रभावित होती है
ब्लेड समय-समय पर कारण बनेंगे
प्रत्येक ब्लेड के प्रणोद बल में परिवर्तन से कंपन उत्पन्न होगा।
सभी अज़ीमुथों में ब्लेड के जोर बल को बराबर करने के लिए और
कार्रवाई से ब्लेडों को उतारना
झुकने के क्षणों में, वास्तविक टेल रोटर के ब्लेड क्षैतिज टिका का उपयोग करके हब से जुड़े होते हैं, जो ब्लेड को फड़फड़ाने की गति करने की अनुमति देते हैं।
प्रोपेलर हब के डिजाइन में अक्षीय टिका की उपस्थिति ब्लेड के सापेक्ष रोटेशन सुनिश्चित करती है
अनुदैर्ध्य अक्ष, जो पिच को बदलने के लिए आवश्यक है।
भारी हेलीकॉप्टरों पर, टेल रोटर्स पर ऊर्ध्वाधर टिका भी लगाया जा सकता है।
§ 16. उपलब्ध रोटर शक्ति
आधुनिक हेलीकॉप्टरों के बिजली संयंत्र पिस्टन या टर्बोप्रॉप विमान इंजन का उपयोग करते हैं।
हेलीकाप्टरों में एयर-कूल्ड पिस्टन विमान इंजन के संचालन की एक विशेष विशेषता है
विशेष पंखों का उपयोग करके इंजन की ठंडी सतहों को जबरन उड़ाने की आवश्यकता। हेलीकॉप्टरों पर इंजनों को जबरन ठंडा करना आगे की उड़ान में शीतलन के लिए उच्च गति के दबाव का उपयोग करने की अपर्याप्त संभावनाओं और होवरिंग मोड में दबाव की कमी से जुड़ा है। टर्बोप्रॉप इंजन वाले हेलीकॉप्टरों में आमतौर पर मुख्य गियरबॉक्स, तेल कूलर, जनरेटर और अन्य इकाइयों को ठंडा करने के लिए पंखे लगाए जाते हैं। पंखे चलाने के लिए नॉक्सल इंजन की शक्ति का कुछ हिस्सा खर्च होता है।
इंजन की शक्ति का एक हिस्सा इंजन को जोड़ने वाले ट्रांसमिशन में घर्षण पर काबू पाने में खर्च होता है
स्क्रू एनटीआर, टेल रोटर एनपीवी के रोटेशन के लिए और हाइड्रोलिक सिस्टम पंप और अन्य इकाइयों की ड्राइव के लिए
ना.
इस प्रकार, मुख्य रोटर को प्रेषित शक्ति प्रभावी शक्ति से कम है
Ne मोटर शाफ्ट पर विकसित हुआ।
यदि हम प्रभावी शक्ति से लागत घटाते हैं, तो हमें उपलब्ध रोटर शक्ति एनपी प्राप्त होती है
Np= Ne.- Noxl.- Nтp – Npв – Na
विभिन्न हेलीकाप्टरों के लिए एनपी 75-85% एनई है।
दूसरे शब्दों में, कूलिंग, ट्रांसमिशन, स्टीयरिंग और ड्राइव इकाइयों के लिए बिजली की हानि होती है
प्रभावी इंजन शक्ति का 15-25%।
प्रभावी इंजन शक्ति और उपलब्ध रोटर शक्ति गति और ऊंचाई पर निर्भर करती है
उड़ान, हालांकि, हेलीकॉप्टर की कम उड़ान गति के कारण, Ne और Np पर गति के प्रभाव को नजरअंदाज किया जा सकता है।
उड़ान की ऊंचाई से उपलब्ध शक्ति में परिवर्तन की प्रकृति इंजन के प्रकार पर निर्भर करती है और निर्धारित होती है
इसकी ऊंचाई संबंधी विशेषताएं (चित्र 1.61)।
यह ज्ञात है कि सुपरचार्जर के बिना पिस्टन इंजन की शक्ति में वृद्धि के साथ निरंतर गति होती है
सिलेंडर में प्रवेश करने वाले वायु-ईंधन मिश्रण के भार आवेश में कमी के कारण ऊंचाई कम हो जाती है। मुख्य रोटर को प्रेषित शक्ति समान रूप से बदलती है (चित्र 1.61/ए)।
सिंगल-स्पीड सुपरचार्जर से लैस पिस्टन इंजन की शक्ति परिवेश के तापमान में कमी और सिलेंडरों के बेहतर शुद्धिकरण के कारण वायु-ईंधन मिश्रण के वजन चार्ज में वृद्धि के कारण ऊंचाई के साथ डिजाइन ऊंचाई तक बढ़ जाती है। सुपरचार्जर एयर डैम्पर को धीरे-धीरे खोलकर, बूस्ट दबाव को डिज़ाइन ऊंचाई तक स्थिर बनाए रखा जाता है। डिज़ाइन ऊंचाई पर, एयर डैम्पर पूरी तरह से खुल जाता है और इंजन की शक्ति अधिकतम तक पहुंच जाती है। डिज़ाइन ऊंचाई के ऊपर, प्रभावी शक्ति, और इसलिए मुख्य रोटर की उपलब्ध शक्ति, उसी तरह घट जाती है जैसे बिना सुपरचार्जर वाले इंजन के लिए (चित्र 1.61, बी)।
दो-स्पीड सुपरचार्जर वाले इंजन के लिए, उड़ान की ऊंचाई के आधार पर प्रभावी और उपलब्ध शक्ति में परिवर्तन की प्रकृति को चित्र में दिखाया गया है। 1.61, सी.
टर्बोप्रॉप इंजन के लिए, उड़ान ऊंचाई पर उपलब्ध रोटर शक्ति की निर्भरता की प्रकृति चित्र में दिखाई गई है। 1.61, जी. एक टर्बोप्रॉप इंजन की शक्ति में एक निश्चित ऊंचाई तक वृद्धि को अपनाई गई नियंत्रण प्रणाली द्वारा समझाया गया है, जो टरबाइन के सामने गैसों के तापमान में एक निश्चित ऊंचाई तक वृद्धि सुनिश्चित करता है।
Pavley> [...] और इसी कारण से मैं चित्र, रेखाचित्र आदि नहीं मांगता। सूक्ष्मताएँ [...]
ऐसे प्रश्नों को रेखाचित्र/ड्राइंग के बिना हल करने का कोई तरीका नहीं है।
इसमें Ka-50 का नहीं, बल्कि एक साधारण कामोव स्तंभ का आरेख है। उदाहरण के तौर पर - Ka-18 (दिमित्री से थोड़ा पुराना)। इस योजना को बाद में Ka-50 (और Ka-60) को छोड़कर, सभी Ka हेलीकॉप्टरों पर किसी न किसी संस्करण में दोहराया गया।
स्लाइडर स्वैशप्लेट और ब्लेड ड्राइवरों के बीच नियंत्रण सर्किट में शामिल एक अतिरिक्त तत्व है। अपने रॉकर्स के साथ क्रॉलर दो संकेतों का एक यांत्रिक योजक है: सामान्य और विभेदक चरण (यदि हम चक्रीय चरण को "तात्कालिक सामान्य" मानते हैं)। परिणामी सिग्नल ब्लेड लीड तक जाता है, जो इस बात पर निर्भर करता है कि क्रॉलर रॉकर्स का कौन सा हिस्सा स्थिर था।
सिंगल-रोटर हेलीकॉप्टरों के विपरीत, समाक्षीय स्वैशप्लेट, केवल ब्लेड की चक्रीय पिच सेट करते हैं। सामान्य और विभेदक चरण सामान्य और विभेदक चरण (ओडीएस) तंत्र का उपयोग करके स्लाइडर्स के आंदोलनों के माध्यम से निर्धारित किया जाता है।
उदाहरण के तौर पर, जमीन से Ka-18 स्तंभ का एक सामान्य दृश्य:
यहाँ डिज़ाइन विवरण का एक अंश दिया गया है:
अनुदैर्ध्य-अनुप्रस्थ नियंत्रण
नियंत्रण हैंडल के विक्षेपण से नियंत्रण छड़ 12 (चित्र 116) की ऊर्ध्वाधर गति होती है, जो नियंत्रण कुंडल डी से निचले स्वैशप्लेट जी की आंतरिक रिंग तक आती है। इस मामले में, अनुदैर्ध्य संबंध में हैंडल का विचलन गति का कारण बनता है केवल अनुदैर्ध्य नियंत्रण रॉड (उड़ान के सामने स्थित) का, पार्श्व संबंध में हैंडल का विक्षेपण, तदनुसार, केवल पार्श्व नियंत्रण रॉड (उड़ान के दाईं ओर स्थित) आंदोलन का कारण बनता है।
पहले मामले में, निचला स्वैशप्लेट, कार्डन सस्पेंशन पर लगा हुआ, अनुदैर्ध्य रूप से झुकता है, और दूसरे मामले में, अनुप्रस्थ रूप से।
जब हैंडल को तिरछे विक्षेपित किया जाता है, तो दोनों छड़ें गति प्राप्त करती हैं, और स्वैशप्लेट हैंडल विक्षेपण की दिशा में झुक जाती है।
चूंकि निचला स्वैशप्लेट जी ऊपरी स्वैशप्लेट बी से कनेक्टिंग रॉड्स 9 द्वारा जुड़ा हुआ है, इसलिए बाद वाला भी उसी दिशा में और उसी कोण पर झुकता है। दोनों स्वैशप्लेट संचालन में एक दूसरे के बिल्कुल समानांतर रहते हैं।
निचली स्वैशप्लेट की बाहरी रिंग निचली स्लाइड पर स्थापित तीन रॉड 5 से तीन रॉकर 7 से जुड़ी हुई है, और तीन रॉड 6 रॉकर के अंतिम टिका से निचले रोटर ब्लेड के लीड 8 तक फैली हुई हैं।
ऊपरी स्लाइडर ए के रॉकर्स के माध्यम से ऊपरी स्वैशप्लेट बी की आंतरिक रिंग का ऊपरी रोटर ब्लेड की ड्राइव के साथ समान संबंध है।
जब स्वैशप्लेट को किसी भी दिशा में झुकाया जाता है, तो स्वैशप्लेट की घूर्णन रिंग को संबंधित रॉकर से जोड़ने वाली प्रत्येक छड़ स्क्रू शाफ्ट की एक क्रांति में गति का एक चक्र पूरा करती है, स्वैशप्लेट के झुकाव की दिशा के दिगंश में गुजरते हुए नीचे जाती है। और ऊपर उठते हुए, स्वैशप्लेट के उभरे हुए आधे भाग के ऊपर से गुजरते हुए।
रॉड की ये ऊर्ध्वाधर गतिविधियां रॉकर के अनुरूप विक्षेपण का कारण बनती हैं, जो एक ही समय में रॉकर को स्लाइड से जोड़ने वाले काज के सापेक्ष घूमती हैं।
नतीजतन, प्रत्येक क्रांति के लिए, घुमाव का अंतिम काज, और इसके साथ ब्लेड का चालक 8, जिसके साथ यह एक रॉड से जुड़ा होता है, ऊर्ध्वाधर गति का एक चक्र पूरा करते हैं, नीचे की ओर से गुजरते समय औसत स्थिति से नीचे गिरते हैं- मशीन के आधे हिस्से को झुकाएं और, औसत स्थिति से ऊपर उठते हुए, उठे हुए स्वैशप्लेट के आधे हिस्से से ऊपर गुजरते समय।
ब्लेड लीड की यह गति अक्षीय काज के बीयरिंगों में ब्लेड टिप के घूमने का कारण बनती है, और इसलिए ब्लेड के इंस्टॉलेशन कोण में एक चक्रीय परिवर्तन होता है।
वहीं, जब ड्राइवर नीचे जाता है तो ब्लेड का इंस्टॉलेशन एंगल कम हो जाता है और जब ऊपर जाता है तो बढ़ जाता है.
स्थापना कोण में परिवर्तन के अनुसार, ब्लेड, बढ़े हुए कोणों के दिगंश में अपेक्षाकृत अधिक उठाने वाला बल प्राप्त करता है और कम कोणों के दिगंश में अपेक्षाकृत छोटा बल प्राप्त करता है, क्षैतिज काज के सापेक्ष फड़फड़ाता हुआ गति करता है, जिसके कारण अक्ष मुख्य रोटर ब्लेड द्वारा वर्णित शंकु झुकता है, और इसके साथ वायुगतिकीय प्रोपेलर बल (जोर) होता है।सामान्य पिच नियंत्रण
सामूहिक पिच को केबल द्वारा सामूहिक पिच लीवर से जुड़े ओडीएस तंत्र के सामूहिक पिच ड्रम 3 को घुमाकर नियंत्रित किया जाता है। इस मामले में, दोनों नियंत्रण छड़ें 10 और 11 संयुक्त गति प्राप्त करती हैं, शाफ्ट के साथ स्लाइडर ए और बी चलती हैं।
स्लाइडर्स की गति के कारण उन पर स्थापित रॉकर्स मध्य काज (जिस पर मशीन की रॉड फिट होती है) के सापेक्ष घूमने लगते हैं। इस मामले में, रॉकर्स को ब्लेड नियंत्रण भुजाओं 8 से जोड़ने वाली छड़ें भुजाओं को समान मात्रा में ऊपर की ओर विक्षेपित करती हैं, अर्थात। जब स्लाइडर नीचे की ओर बढ़ते हैं तो ब्लेड के इंस्टॉलेशन कोण को बढ़ाएं और, इसके विपरीत, नीचे की ओर झुकें, यानी। स्लाइडर्स को ऊपर ले जाते समय ब्लेड के इंस्टॉलेशन कोण को कम करें।
ब्लेड की स्थापना के कोणों में वृद्धि (प्रोपेलर की ऊंचाई) से मुख्य रोटर द्वारा बनाए गए लिफ्ट बल में वृद्धि होती है, साथ ही साथ इसकी प्रतिक्रिया टोक़ में भी वृद्धि होती है; स्थापना कोणों को कम करने (प्रोपेलर को हल्का करने) से इसकी उठाने की शक्ति कम हो जाती है। प्रोपेलर का प्रतिक्रियाशील टॉर्क भी कम हो जाता है।
इस तथ्य के कारण कि हेलीकॉप्टर के मुख्य रोटर अलग-अलग दिशाओं में घूमते हैं, और सामूहिक पिच को नियंत्रित करते समय दोनों प्रोपेलर की स्थापना के कोण में परिवर्तन होता है, इसलिए, प्रतिक्रियाशील क्षणों में परिवर्तन दोनों प्रोपेलर के लिए समान मात्रा में होता है, इन क्षणों का संतुलन बनाए रखा जाता है, जिसके कारण सामूहिक पिच को नियंत्रित करते समय हेलीकॉप्टर ऊर्ध्वाधर अक्ष के चारों ओर घूमने की प्रवृत्ति नहीं रखता है, जो समाक्षीय हेलीकॉप्टरों की एक विशिष्ट संपत्ति है जो उनके संचालन को सरल बनाती है।विभेदक पिच नियंत्रण
अंतर पिच को ओडीएस तंत्र के अंतर पिच के ड्रम 1 को घुमाकर नियंत्रित किया जाता है, जो एक पैर नियंत्रण केबल द्वारा किया जाता है।
इसके अलावा, इस तथ्य के कारण कि विभेदक पिच ड्रम से जुड़े ऊपरी 4 और निचले 2 थ्रेडेड झाड़ियों में अलग-अलग दिशाओं (दाएं और बाएं) में चलने वाले धागे होते हैं, स्लाइडर की छड़ें 10 और 11 और स्लाइडर स्वयं समान गति प्राप्त करते हैं अलग-अलग दिशाएँ, जिसके कारण ब्लेड का इंस्टॉलेशन कोण समान होता है, स्क्रू बढ़ता है, और दूसरा उसी मात्रा से घटता है।
इसमें प्रत्येक प्रोपेलर के जोर और प्रतिक्रियाशील टॉर्क में एक समान परिवर्तन शामिल है।
प्रोपेलर में से एक का प्रतिक्रिया टॉर्क बढ़ता है, दूसरे का घटता है, जिसके कारण उनका संतुलन गड़बड़ा जाता है और हेलीकॉप्टर हल्के प्रोपेलर के घूमने की दिशा में मुड़ना शुरू कर देता है।
चूंकि एक मुख्य रोटर का जोर बढ़ता है और दूसरे का जोर उसी मात्रा में घटता है, इसलिए उनका कुल जोर अपरिवर्तित रहता है, जिसके कारण पैडल द्वारा संचालित होने पर एक समाक्षीय हेलीकॉप्टर को ऊर्ध्वाधर गति नहीं मिलती है, जिससे पायलट करना भी आसान हो जाता है।
Ka-50 हेलीकॉप्टर पर, कॉलम लेआउट को पूरी तरह से नया रूप दिया गया है।
दिमित्री_ए> यहां समाक्षीय स्तंभ का एक और वीआरएमएल मॉडल है...
वहां एक सामान्य अपमान है - निचला स्वैशप्लेट सीधे तीन हाइड्रोलिक बूस्टर पर लटका हुआ है। हमारे पास संभवतः केवल अंसत पर ही ऐसी योजना है।
यह आविष्कार एक टॉर्शन बार रोटर हब के साथ हेलीकॉप्टर के मुख्य रोटर शाफ्ट पर उड़ान के दौरान झुकने वाले तनाव को निर्धारित करने की एक विधि से संबंधित है। तनाव निर्धारित करने के लिए, उड़ान प्रदर्शन विशेषताओं को पूरे उड़ान समय के दौरान मानक साधनों का उपयोग करके मापा जाता है, महत्वपूर्ण मापदंडों का चयन किया जाता है और उनसे व्यवस्थित किया जाता है, मुख्य रोटर शाफ्ट में तनाव की निर्भरता के अंतिम कार्य को प्राप्त करने के लिए उनके अनुमानित कार्यों को निर्धारित किया जाता है। चयनित उड़ान प्रदर्शन पैरामीटर, गणितीय मॉडल का उपयोग करके मुख्य रोटर शाफ्ट पर लोड को पार होने पर संकेत दिया जाता है। अवशिष्ट जीवन का निर्धारण और भार के अनुमेय स्तर का नियंत्रण सुनिश्चित किया जाता है। 2 वेतन एफ-ली, 7 बीमार।
आविष्कार विमानन के क्षेत्र से संबंधित है, विशेष रूप से विमान की तकनीकी स्थिति की निगरानी के लिए प्रणालियों से संबंधित है, अर्थात् उड़ान में हेलीकॉप्टर रोटर शाफ्ट के झुकने वाले तनाव के स्तर की निगरानी करना, विशेष रूप से हल्के बहुउद्देश्यीय हेलीकॉप्टर के लिए हिंगलेस ब्लेड माउंटिंग के साथ, उदाहरण के लिए हेलीकॉप्टर: ANSAT, VK-117, EC-145।
ट्रांसमिशन हेलीकॉप्टर डिज़ाइन का सबसे जटिल तत्व है। यह ज्ञात है कि हेलीकॉप्टर दुर्घटनाओं का सबसे बड़ा प्रतिशत (39% तक) सांख्यिकीय रूप से हेलीकॉप्टर ट्रांसमिशन इकाइयों की विफलता से जुड़ा है।
निगरानी प्रणाली विकसित करने के चरण में, सबसे महत्वपूर्ण बात हेलीकॉप्टर ट्रांसमिशन इकाइयों की तकनीकी स्थिति के नैदानिक संकेतों की पहचान करना और स्थापित करना है। एक निगरानी प्रणाली विकसित करने में मुख्य कार्य नैदानिक संकेतों के थ्रेशोल्ड मान स्थापित करना है, जिस पर पहुंचने पर संचालन में आगे की उड़ान सुरक्षा पर उचित निर्णय लिए जाने चाहिए। यदि कोई नैदानिक संकेत अपने सीमा मूल्य तक पहुंच गया है, तो संसाधन को सीमित करने, किसी हिस्से को तत्काल बदलने, या ट्रांसमिशन यूनिट को सेवा से हटाने का निर्णय लिया जाता है। एक नियम के रूप में, उड़ान के दौरान अधिकांश नैदानिक संकेत कॉकपिट में प्रदर्शित नहीं होते हैं। इनका विश्लेषण उड़ान पूरी होने के बाद किया जाता है. हालाँकि, यदि सुरक्षा स्थितियों की आवश्यकता हो तो उड़ान के दौरान कुछ विशेष रूप से महत्वपूर्ण नैदानिक संकेत प्रदर्शित किए जा सकते हैं।
हाल के दशकों में, तथाकथित हिंगलेस रोटर्स, एक हिंगलेस बुशिंग से सुसज्जित, जिसमें क्षैतिज, ऊर्ध्वाधर और अक्षीय टिका के कार्य एक विस्तारित प्रकार के लोचदार तत्व - एक मरोड़ पट्टी द्वारा किए जाते हैं, का उपयोग होनहार हेलीकॉप्टरों पर किया जाने लगा है। मरोड़ पट्टी डिज़ाइन का मुख्य भाग लोचदार रूप से विकृत अनुभाग है। प्लाइवुड परतों और स्लॉट्स की उपस्थिति टॉर्सियन बार स्ट्रैंड्स को मुख्य रूप से अनुप्रस्थ कतरनी के साथ एक अक्षीय तनाव-तनाव की स्थिति में लोड करने और ब्लेड के रोटेशन के विमान में घूमने पर झुकने की सुविधा प्रदान करती है। इससे हेलीकॉप्टर के संचालन की लागत को कम करना संभव हो जाता है, लेकिन साथ ही ऐसी संरचनाओं के डिजाइन और निर्माण की प्रारंभिक लागत बढ़ जाती है। इसलिए, भार पूर्वानुमान की सटीकता और, तदनुसार, हेलीकॉप्टर की भार-वहन प्रणाली के जीवन का अनुमान लगाना आज हेलीकॉप्टर इंजीनियरिंग में प्रमुख कार्यों में से एक है।
मुख्य रोटर शाफ्ट अपने हब से बलों और क्षणों से भरा होता है और मुख्य गियरबॉक्स के आउटपुट पर उत्पन्न टॉर्क होता है। रोटर शाफ्ट की लंबाई लेआउट, वायुगतिकीय और परिचालन विचारों द्वारा निर्धारित की जाती है।
चूंकि अर्ध-कठोर झाड़ी में टिका हुआ झाड़ी की तुलना में बड़ा झुकने वाला क्षण होता है, इसलिए उड़ान में एक हेलीकॉप्टर रोटर शाफ्ट के झुकने वाले तनाव की निगरानी करना एक जरूरी काम है।
रोटर शाफ्ट लोडिंग की निगरानी के लिए एक प्रणाली ज्ञात है (यूएस पेटेंट संख्या 2010219987, सिकोरस्की एयरक्राफ्ट, प्रकाशन दिनांक 09/02/2010, आईपीसी जी06एफ 15/00, जी08बी 21/00)।
वर्तमान आविष्कार के एक अवतार के अनुसार हेलीकॉप्टर रोटर सिस्टम पर लोड की वस्तुतः निगरानी करने की एक विधि में रोटर के पूर्ण रोटेशन के लिए कम से कम एक विमान पैरामीटर का नमूना लेना शामिल है। कम से कम एक विमान के पैरामीटर से उच्च-आवृत्ति संकेतों का एक सेट प्राप्त करने के लिए गुणांक की गणना। विश्लेषण किए गए संकेतों का एक सेट प्राप्त करने के लिए उच्च आवृत्ति संकेतों की बहुलता में से प्रत्येक को एक कारक से गुणा करना। विश्लेषण किए गए संकेतों के आधार पर रोटर लोड अनुमान।
वर्तमान आविष्कार के एक अवतार के अनुसार एक वास्तविक समय रोटर स्थिति का पता लगाने वाली प्रणाली में डेटा प्राप्त करने के लिए भार मापने के लिए एक सेंसर प्रणाली शामिल है। मॉड्यूल को डिज़ाइन डेटा प्राप्त करने और वास्तविक समय में दोषों का पता लगाने के लिए लोड को वस्तुतः नियंत्रित करने और मूल्यों को प्राप्त करने के लिए मापा संकेतों से डिज़ाइन संकेतों को घटाने के लिए एक एल्गोरिदम प्राप्त करने के लिए कॉन्फ़िगर किया गया है, जिसे बाद में अंतिम परिणाम उत्पन्न करने के लिए मानक मूल्यों के साथ तुलना की जाती है। रोटर की स्थिति.
सेंसर विमान के टेक-ऑफ वजन, घनत्व ऊंचाई, रोटर गति, वायु प्रवाह गति, सामान्य त्वरण, चढ़ाई की ऊर्ध्वाधर दर, इंजन टॉर्क, पिच कोण, रोल कोण, यॉ दर, पिच दर, रोल कोणीय वेग, अनुदैर्ध्य विक्षेपण जैसे मापदंडों को पढ़ते हैं। , पार्श्व स्थिति, पैडल स्थिति और रोटर क्रांति के अनुसार स्थितियों का एक सेट। दस गुणांक (c1, c2, c3, c4, c5, c6, c7, c8, c9, और c10) दस कंपन मान निर्धारित करने के लिए। प्रवर्धित दोलन प्राप्त करने के लिए दोलन मूल्यों को एक कारक से गुणा किया जाता है। यदि कंपन वैक्टर को w1, w2, w3, w4, w5, w6, w7, w8, w9, और w10 के रूप में दर्शाया गया है, और गुणांक c1, c2, c3, c4, c5, c6, c7, c8, c9 हैं, और c10, तो मुख्य रोटर शाफ्ट कतरनी बल का परिकलित संकेत इस रूप में लिखा जाएगा:
L=c1*w1+c2*w2+c3*w3+c4*w4+c5*w5+c6*w6+c7*w7+c8*w8+c9*w9+c10*w10
अपरूपण बल के आयाम और चरण की गणना फूरियर रूपांतरण के माध्यम से की जाती है।
डेटा एकत्र करने, निगरानी करने और हेलीकॉप्टर रोटर ड्राइव इकाइयों की तकनीकी स्थिति का निदान करने के लिए एक ज्ञात प्रणाली (आविष्कार संख्या 2519583 के लिए आरएफ पेटेंट, 27 फरवरी 2014 को प्रकाशित, आईपीसी बी64डी 45/00), जिसमें पीजोइलेक्ट्रिक कंपन सेंसर भी शामिल हैं जो कि स्थापित हैं बॉडी, कम से कम, हेलीकॉप्टर रोटर ड्राइव इकाइयों में से एक और स्थित हैं ताकि वे भागों की तकनीकी स्थिति का निदान करने के लिए पर्याप्त पूर्णता के साथ डेटा प्राप्त करें, एक ऑपरेटिंग हेलीकॉप्टर की कम से कम एक रोटर ड्राइव इकाई की असेंबली, और ऑन-बोर्ड इलेक्ट्रॉनिक इकाई। इलेक्ट्रॉनिक इकाई कंपन सेंसर के आउटपुट से जुड़ी है और डिजिटल रूप से कंपन संकेतों को संसाधित करने, नियंत्रित करने और एकत्र करने, प्राथमिक प्रसंस्करण और व्यक्तिगत सेंसर और/या उनके संयोजनों से संकेतों के मापदंडों का मूल्यांकन करने, सेंसर डेटा जमा करने और उन्हें बाहरी और पर संग्रहीत करने में सक्षम है। /या हटाने योग्य मीडिया कंप्यूटर द्वारा पढ़ने के लिए उपयुक्त है, और जमीनी परिस्थितियों में माध्यमिक प्रसंस्करण के लिए उपयुक्त है। डेटा संग्रह की दक्षता, एक ऑपरेटिंग हेलीकॉप्टर की रोटर ड्राइव इकाइयों की तकनीकी स्थिति की निगरानी और निदान की सूचना सामग्री बढ़ जाती है।
इस निगरानी प्रणाली का नुकसान उड़ान में मापे गए कंपन के आधार पर मुख्य रोटर शाफ्ट सहित हेलीकॉप्टर घटकों में थकान तनाव के स्तर के बारे में स्पष्ट निष्कर्ष निकालने में असमर्थता है। एक और नुकसान हेलीकॉप्टरों पर सेंसर और इलेक्ट्रॉनिक इकाइयों को स्थापित करने की आवश्यकता है, और जमीन पर माध्यमिक डेटा प्रोसेसिंग के लिए आवश्यक समय है।
हेलीकॉप्टर को संचालित करने की एक ज्ञात विधि है (आरएफ पेटेंट संख्या 2543111, 02/27/2015 को प्रकाशित, आईपीसी वी64एस 27/04, बी64एफ 5/00, जी01एल 3/24), जिसमें हेलीकॉप्टर के वास्तविक जोर की निगरानी करना शामिल है प्रत्येक उड़ान के दौरान रोटर, और हेलीकॉप्टर का संचालन शुरू करने से पहले, पावर प्लांट इंजन की विशेषताओं पर प्रारंभिक डेटा प्रपत्रों के अनुसार एकत्र किया जाता है और हेलीकॉप्टर के नियंत्रण होवरिंग के दौरान मुख्य रोटर थ्रस्ट के परिमाण पर प्रारंभिक डेटा एकत्र किया जाता है। हेलीकॉप्टर के पूरे संचालन के दौरान, हेलीकॉप्टर होवरिंग मोड में मुख्य रोटर थ्रस्ट के मूल्य पर वास्तविक डेटा एकत्र और रिकॉर्ड किया जाता है, ऑन-बोर्ड कंप्यूटर का उपयोग करके, मुख्य रोटर थ्रस्ट पर प्राप्त सांख्यिकीय डेटा की तुलना प्रारंभिक मूल्यों के साथ की जाती है और , प्रारंभिक मूल्य से निर्दिष्ट मूल्य तक मुख्य रोटर थ्रस्ट के मूल्य में कमी की स्थिति में, इंजन मापदंडों को मूल्यों में समायोजित करने की आवश्यकता के बारे में मॉनिटर पर ऑन-बोर्ड कंप्यूटर का उपयोग करके एक संकेत उत्पन्न होता है। जो मूल मान के 0.5% के भीतर मुख्य रोटर थ्रस्ट का विचलन सुनिश्चित करता है। इंजन मापदंडों को या तो स्वचालित रूप से या जमीन पर रखरखाव कर्मियों द्वारा समायोजित किया जाता है। प्रभाव: हेलीकाप्टर उपयोग की बढ़ी हुई दक्षता।
ऑपरेशन की इस पद्धति का नुकसान प्राप्त परिणामों से मुख्य रोटर शाफ्ट पर थकान तनाव के स्तर को निर्धारित करने की असंभवता है, क्योंकि इस पर थकान तनाव झुकने वाले तनाव से निर्धारित होता है। एक और नुकसान हेलीकॉप्टरों पर सेंसर और इलेक्ट्रॉनिक इकाइयों को स्थापित करने की आवश्यकता है, और जमीन पर माध्यमिक डेटा प्रोसेसिंग के लिए आवश्यक समय है। एक और नुकसान यह है कि हेलीकॉप्टर का संचालन शुरू करने से पहले, फॉर्म के अनुसार पावर प्लांट इंजन की विशेषताओं पर प्रारंभिक डेटा एकत्र करना और हेलीकॉप्टर के नियंत्रण होवरिंग के दौरान मुख्य रोटर थ्रस्ट के परिमाण पर प्रारंभिक डेटा एकत्र करना आवश्यक है। .
यूएस पेटेंट नंबर 2011112806, प्रकाशन, को निकटतम एनालॉग के रूप में चुना गया था। 2011.05.12, आईपीसी जी06एफ 10/17. यह आविष्कार रोटरी-विंग विमान के एक घटक की गंभीर स्थिति के बारे में जानकारी प्रदान करने की एक विधि से संबंधित है, जिसमें फेयरिंग, शाफ्ट और ब्लेड की बहुलता सहित रोटर चलाने वाला कम से कम एक इंजन शामिल है। एक विमान के रोटर पर अभिनय करने वाले झुकने और चक्रीय भार को मापने के लिए सेंसर में (ए) पहले गणना मॉडल का उपयोग करके रोटर असेंबली के बीयरिंग के वर्तमान तापमान की गणना करने के लिए एक कंप्यूटिंग इकाई शामिल है, (बी) पहले का उपयोग करके असर तापमान की भविष्यवाणी करना गणना मॉडल, और (सी) दूसरे गणना मॉडल का उपयोग करके रोटर असेंबली के एक चयनित घटक पर लोड लागू करना, पहले और दूसरे गणना मॉडल को क्रमशः असर तापमान और लोड अभिनय के अनुमानित और वर्तमान मूल्य की गणना करने के लिए कॉन्फ़िगर किया जा रहा है। नियंत्रण उड़ान मापदंडों के आधार पर चयनित घटक पर; और एकल पैमाने पर एक चल संकेतक को प्रदर्शित करने के लिए एक प्रदर्शन इकाई जो अनुमानित असर तापमान के उच्चतम मूल्य और चयनित घटक पर काम करने वाले भार से संचालित होती है। डिस्प्ले एक अन्य गतिमान संकेतक दिखाता है, जो वर्तमान असर तापमान द्वारा सक्रिय होता है।
प्रोटोटाइप का नुकसान बाहरी सेंसर स्थापित करने की आवश्यकता है, जो कुछ कठिनाइयों को प्रस्तुत करता है, क्योंकि सीरियल हेलीकॉप्टरों का डिज़ाइन बाहरी सेंसर स्थापित करने के लिए अनुकूलित नहीं है; इसके अलावा, रखरखाव और क्षेत्र की मरम्मत प्रक्रियाओं में, बाहरी सेंसर पूरी तरह से एकीकृत नहीं होते हैं विमान के बाकी उपकरणों और तकनीकी संचालन के लिए अतिरिक्त दिशानिर्देशों और मैनुअल और अतिरिक्त प्रशिक्षित विशेषज्ञों की आवश्यकता होती है।
प्रस्तावित तकनीकी समाधान का उद्देश्य पूरी उड़ान के दौरान (टेकऑफ़ से लैंडिंग तक) रोटर शाफ्ट पर झुकने वाले तनाव की निगरानी के लिए एक विधि बनाना है ताकि शाफ्ट को थकान से होने वाली क्षति का पता लगाया जा सके और आपातकालीन स्थितियों को रोका जा सके।
तकनीकी परिणाम अवशिष्ट जीवन का निर्धारण और अनुमेय भार स्तर का नियंत्रण है।
तकनीकी परिणाम इस तथ्य से प्राप्त होता है कि टोरसन बार रोटर हब वाले हेलीकॉप्टर के मुख्य रोटर शाफ्ट पर उड़ान झुकने वाले तनाव को निर्धारित करने की विधि में हेलीकॉप्टर के उड़ान प्रदर्शन की निगरानी के मानक माध्यमों से पूरे उड़ान समय के दौरान माप शामिल होता है, मुख्य रोटर शाफ्ट पर लोड के गणितीय मॉडल का उपयोग करके गणना और यदि वे पार हो जाते हैं तो सिग्नलिंग, मापी गई उड़ान प्रदर्शन विशेषताओं में से, महत्वपूर्ण पैरामीटर जो रोटर शाफ्ट के लोड स्तर पर सीधा प्रभाव डालते हैं, का चयन और व्यवस्थित किया जाता है, अनुमानित कार्य उड़ान प्रदर्शन विशेषताओं के चयनित मापदंडों पर रोटर शाफ्ट σ(t) में तनाव की निर्भरता के अंतिम कार्य को निर्धारित करने के लिए महत्वपूर्ण पैरामीटर निर्धारित किए जाते हैं, रोटेशन के कोणों में परिवर्तन की दरों के पूर्ण मान अनुदैर्ध्य और अनुप्रस्थ दिशाओं में स्वैशप्लेट को अंतिम फ़ंक्शन में जोड़ा जाता है:
प्रस्तावित विधि किसी को उड़ान संचालन के दौरान किसी भी समय मुख्य रोटर शाफ्ट के लोड स्तर का मूल्यांकन करने की अनुमति देती है। हेलीकॉप्टर उड़ान मापदंडों की निगरानी के मानक साधनों के उपयोग के आधार पर, यह आपको पूरे उड़ान समय के दौरान झुकने वाले तनाव के स्तर को निर्धारित करने, उड़ान प्रतिबंधों को रिकॉर्ड करने और चालक दल को अनुमेय भार स्तर से अधिक के बारे में सूचित करने के साथ-साथ निर्धारित करने की अनुमति देता है। अवशिष्ट जीवन.
दावा किए गए आविष्कार में, उड़ान में संचालित एकल-रोटर हेलीकॉप्टर के मुख्य रोटर शाफ्ट के वास्तविक झुकने वाले तनाव के संकेत के उदाहरण का उपयोग करके विशेष रूप से महत्वपूर्ण नैदानिक विशेषताओं के लिए सीमा मूल्यों की उचित स्थापना के लिए शर्तों का विश्लेषण किया गया है। , विशेष रूप से ANSAT हेलीकाप्टरों के लिए।
आविष्कार का सार इस तथ्य में निहित है कि उड़ान में नियंत्रित मापदंडों में से, उन मापदंडों का चयन और व्यवस्थित किया जाता है जिनका एनवी शाफ्ट के लोड स्तर पर सीधा प्रभाव पड़ता है। प्रदर्शन विशेषताओं के चयनित मापदंडों पर एनवी शाफ्ट में तनाव की निर्भरता के अंतिम कार्य को निर्धारित करने के लिए महत्वपूर्ण मापदंडों के अनुमानित कार्य निर्धारित किए जाते हैं। अनुदैर्ध्य और अनुप्रस्थ दिशाओं में स्वैशप्लेट के घूर्णन के कोणों में परिवर्तन की दरों के पूर्ण मान अंतिम फ़ंक्शन में जोड़े जाते हैं।
एक उड़ान प्रयोग का संचालन करना। एक महत्वपूर्ण पैरामीटर का चुनाव हेलीकॉप्टर की उड़ान प्रदर्शन विशेषताओं के वर्तमान मूल्यों से निर्धारित होता है। ऐसा करने के लिए, हेलीकॉप्टर शाफ्ट पर एक स्ट्रेन गेज स्थापित किया जाता है और एक वास्तविक उड़ान में, वोल्टेज मान σ स्रोत (टी) समय-समय पर दर्ज किए जाते हैं, साथ ही मानक माध्यमों से मापे गए प्रक्षेपवक्र मापदंडों के मान भी दर्ज किए जाते हैं। हेलीकॉप्टर उड़ान मापदंडों की निगरानी, उदाहरण के लिए: स्वैशप्लेट के झुकाव के अनुदैर्ध्य और अनुप्रस्थ कोण, मुख्य रोटर की समग्र पिच, हेलीकॉप्टर की गति, हेलीकॉप्टर पिच कोण, हेलीकॉप्टर रोल कोण, स्वैशप्लेट के झुकाव के कोण में परिवर्तन की दर अनुदैर्ध्य और अनुप्रस्थ दिशा, आदि।
प्रारंभिक विश्लेषण द्वारा, प्रदर्शन विशेषताओं के मापदंडों का चयन किया जाता है जो एनवी शाफ्ट पर वोल्टेज पर सबसे अधिक प्रभाव डालते हैं, जिसके लिए शाफ्ट पर वोल्टेज में परिवर्तन के ग्राफ़ मानक द्वारा दर्ज किए गए मापदंडों के मूल्यों के आधार पर प्लॉट किए जाते हैं। प्रदर्शन विशेषताओं के मापदंडों को फ़िल्टर करने के लिए नियंत्रण साधन, और सहसंबंध गुणांक पाए जाते हैं और उनका मूल्यांकन किया जाता है।
0.2 से अधिक सहसंबंध गुणांक वाले प्रदर्शन विशेषताओं के प्रक्षेपवक्र मापदंडों को महत्वपूर्ण के रूप में चुना गया है।
अनुमानित वक्रों का निर्माण किया जाता है (चयनित प्रदर्शन मापदंडों पर मुख्य रोटर शाफ्ट पर तनाव की निर्भरता) और समय के साथ झुकने वाले तनाव के लिए फ़ंक्शन का अनुमान निर्धारित करने के लिए समीकरणों की एक प्रणाली संकलित की जाती है σ कैल्क (टी):
और संबंधित भार गुणांक A1, A2, A3, ..., An पाए जाते हैं।
गुणांक A1, A2, A3 को न्यूनतम वर्ग विधि (विशिष्ट प्रदर्शन विशेषताओं वाले एक विशिष्ट हेलीकॉप्टर के लिए) का उपयोग करके बहुपद सन्निकटन द्वारा पाया जाता है।
अंतिम सूत्र इस प्रकार है:
जहां Dprod अनुदैर्ध्य दिशा में स्वैशप्लेट के झुकाव का कोण है,
डीपीओपी - अनुप्रस्थ दिशा में स्वैशप्लेट के झुकाव का कोण,
दोष मुख्य रोटर की कुल पिच है,
एक्स एन - अन्य महत्वपूर्ण उड़ान प्रदर्शन पैरामीटर,
 - अनुदैर्ध्य दिशा में स्वैशप्लेट के घूर्णन के कोण में परिवर्तन की गति का पूर्ण मूल्य,
- अनुदैर्ध्य दिशा में स्वैशप्लेट के घूर्णन के कोण में परिवर्तन की गति का पूर्ण मूल्य,
 - अनुप्रस्थ दिशा में स्वैशप्लेट के घूर्णन के कोण में परिवर्तन की गति का पूर्ण मूल्य।
- अनुप्रस्थ दिशा में स्वैशप्लेट के घूर्णन के कोण में परिवर्तन की गति का पूर्ण मूल्य।
हेलीकॉप्टर के मुख्य रोटर शाफ्ट के झुकने वाले तनाव की गणना एम्बेडेड प्रोग्राम के आधार पर ऑन-बोर्ड कंप्यूटर की कंप्यूटिंग इकाई में पूरे उड़ान समय के दौरान वास्तविक समय में की जाती है। जब सुरक्षित वोल्टेज स्तर पार हो जाता है, तो पायलट को एक संकेत भेजा जाता है और घंटों में खर्च किए गए संसाधन की गणना सूत्र के अनुसार शुरू होती है:
जहां पीआर सुरक्षित स्तर से अधिक तनाव स्तर द्वारा शुरू की गई क्षति क्षमता है;
पीटी.पी. - सामान्य परिचालन स्थितियों के लिए सेवा जीवन की गणना करते समय ली गई एक सामान्य उड़ान के प्रति घंटे की क्षति दर।
सुरक्षित स्तर से अधिक तनाव स्तर के कारण होने वाली क्षति का निर्धारण निम्नलिखित विधि का उपयोग करके किया जाता है:
सुरक्षित स्तर से अधिक प्रत्येक लोड स्तर के लिए, विफलता (नी) के चक्रों की संबंधित संख्या थकान वक्र का उपयोग करके निर्धारित की जाती है (वक्र रोटर शाफ्ट थकान परीक्षणों के परिणामों से लिया जाता है);
सुरक्षित पीआर से अधिक तनाव स्तर के कारण होने वाली क्षति को इस स्तर पर चक्रों की संख्या और विफलता (नी) से पहले चक्रों की संख्या के अनुपात के रूप में परिभाषित किया गया है।
इस प्रकार, प्रत्येक उड़ान के बाद मुख्य रोटर शाफ्ट की व्यतीत सेवा जीवन की गणना की जाती है। यदि अधिकतम लोड स्तर पार नहीं किया गया था, तो मुख्य रोटर शाफ्ट का व्यतीत सेवा जीवन वास्तविक उड़ान समय के बराबर है; यदि सुरक्षित लोड स्तर की अधिकता दर्ज की गई थी, तो ऊपर वर्णित विधि के अनुसार निर्धारित समय जोड़ा जाता है वास्तविक उड़ान का समय.
चूँकि प्रत्येक नैदानिक सुविधा के लिए विश्वसनीय जानकारी प्राप्त करने के लिए हमेशा एक माप प्रक्रिया आवश्यक होती है, तदनुसार, प्रत्येक नैदानिक सुविधा के लिए अपरिहार्य माप त्रुटियों को ध्यान में रखना भी आवश्यक है। फिर इसके सीमा मूल्यों को पार करने या न करने का निर्णय भी सीमा राज्यों के क्षेत्र की ऊपरी (या निचली) सहनशीलता को ध्यान में रखते हुए किया जाना चाहिए।
एक निश्चित सीमित मूल्य σ पीआर स्थापित किया जाना चाहिए, जिसकी अधिकता रोटर शाफ्ट के थकान जीवन की तेजी से थकावट और बाद की उड़ान के समय में इसके संभावित विनाश पर जोर देती है। चूंकि यह पैरामीटर, या डायग्नोस्टिक संकेत, विशेष रूप से महत्वपूर्ण है, कॉकपिट में इसके वर्तमान मूल्य का संकेत आवश्यक है। आइए इसे इस प्रकार निरूपित करें - संकेतक द्वारा अनुमत वर्तमान मापा मान σph का मान।
वास्तविक वर्तमान मान σф को योग के रूप में दर्शाया जा सकता है:
जहां mσ विचाराधीन उड़ान मोड में मुख्य रोटर शाफ्ट के सबसे अधिक भार वाले खंड में झुकने वाले तनाव की गणितीय अपेक्षा है, Δσ इसकी गणितीय अपेक्षा से वास्तविक मान σф का विचलन है।
आविष्कार का विवरण
शाफ्ट के लोड स्तर को प्रभावित करने वाले मापदंडों का व्यावहारिक निर्धारण।
1. एकल-रोटर ANSAT डिज़ाइन वाले हेलीकॉप्टर पर एक उड़ान प्रयोग किया गया था, जिसके दौरान मुख्य रोटर शाफ्ट पर स्थापित एक स्ट्रेन गेज का उपयोग करके एक विशिष्ट अवधि में झुकने वाले भार के मूल्यों को मापा गया था। प्रयोगात्मक निर्भरता σ स्रोत (टी) चित्र में दिखाया गया है। 1 (वक्र 1). यह निर्भरता एक विशिष्ट उड़ान मोड में प्राप्त की गई थी, जिसमें निम्नलिखित मोड शामिल थे:
क) मँडराना (मँडराते समय घुमावों सहित)
बी) त्वरण
ग) जमीन के पास कम गति
घ) चढ़ना
ई) विभिन्न गति पर क्षैतिज उड़ान
ई) मोड़
छ) मोटर योजना
ज) ब्रेक लगाना
उड़ान के दौरान, मानक हेलीकॉप्टर नियंत्रण उपकरण का उपयोग करके, समय के साथ निम्नलिखित प्रक्षेपवक्र मापदंडों को मापा गया।
1. गति, इकाई किमी/घंटा.
इसे "स्पीड इंडिकेटर USVITs-350 डिजिटल आउटपुट के साथ" डिवाइस द्वारा मापा गया था। इनपुट सिग्नल के नाममात्र मूल्यों पर सामान्य जलवायु परिस्थितियों में वर्तमान संकेतित गति का डिजिटल सिग्नल जारी करने में त्रुटि ±6 किमी/घंटा से अधिक नहीं होती है।
2. ऊँचाई, माप की इकाई मी।
उपकरणों द्वारा मापा गया:
- "ऊंचाई संकेतक वीएमसी-10" - डिजिटल आउटपुट के साथ यांत्रिक तुंगतामापी। सापेक्ष उड़ान ऊंचाई का डिजिटल सिग्नल जारी करने में त्रुटि, मीटर पर सेट वायुमंडलीय दबाव 760 मिमी एचजी होने पर रीडिंग में भिन्नता। (1013 hPa) सामान्य जलवायु परिस्थितियों में, ऊंचाई पर निर्भर करता है: ±10 मीटर (ओम की ऊंचाई पर) से ±30 मीटर (6000 मीटर की ऊंचाई पर);
- "रेडियो अल्टीमीटर ए-053-05.02" - आवृत्ति-संग्राहक रेडियो तरंगों के निरंतर उत्सर्जन के साथ एक ऑन-बोर्ड रडार स्टेशन। किसी भी चिकनी सतह (जैसे कि रनवे) पर 120 मीटर/सेकेंड तक की क्षैतिज गति और ±20° तक के रोल और पिच कोण पर 8 मीटर/सेकेंड से अधिक की ऊर्ध्वाधर गति के साथ उड़ान भरने पर ऊंचाई माप में त्रुटि 0 से 1500 मीटर की ऊंचाई सीमा में 95% ऊंचाई माप है, मी: डिजिटल आउटपुट 0.45 या ±0.02N (जो भी अधिक हो)।
3. हेलीकाप्टर का रोल कोण और पिच कोण, डिग्री।
इसे AGB-96D एटिट्यूड इंडिकेटर डिवाइस द्वारा मापा जाता है - यह हेलीकॉप्टर के रोल और पिच के सिग्नल उत्पन्न करता है। कंपन आधार पर रोल और पिच में एटीट्यूड इंडिकेटर की त्रुटि ±2.5° से अधिक नहीं है।
4. नियंत्रण की स्थिति, माप की इकाई डिग्री।
इसे "नियंत्रण तत्वों डीपी-एम के पोटेंशियोमेट्रिक दो-चैनल स्थिति सेंसर" डिवाइस द्वारा मापा जाता है। मापन त्रुटि ±30"।
5. स्टीयरिंग ड्राइव के आउटपुट लिंक (छड़) की स्थिति (अनुदैर्ध्य और अनुप्रस्थ दिशाओं में स्वैशप्लेट के झुकाव के कोण) आरपी -14, मिमी।
इसे "पोटेंशियोमेट्रिक सेंसर्स MU-615A सीरीज 1" डिवाइस द्वारा मापा जाता है। सामान्य परिस्थितियों में कोण माप त्रुटि: नाममात्र माप सीमा का ±2%।
6. कोणीय वेग, रेड/एस.
इसे डिवाइस "प्राथमिक सूचना सेंसर BDPI-09 का ब्लॉक" द्वारा मापा जाता है - यह कोणीय वेग और रैखिक त्वरण वैक्टर के अनुमानों के बारे में जानकारी प्रदान करता है।
आंकड़े 2-7 मापा मापदंडों पर मुख्य रोटर शाफ्ट पर वोल्टेज की निर्भरता दिखाते हैं। दिए गए मापदंडों की सूची दिए गए मापदंडों तक सीमित नहीं है और विशिष्ट हेलीकॉप्टर पर निर्भर करती है।
प्रयोग के दौरान, समय के साथ निम्नलिखित मापदंडों को मापा गया:
σ(टी) - समय के साथ झुकने वाले तनाव का मूल्य, शाफ्ट पर एक तनाव गेज द्वारा मापा जाता है,
Dprod(t) - अनुदैर्ध्य दिशा में स्वैशप्लेट के झुकाव का कोण,
डीपीओपी(टी) - अनुप्रस्थ दिशा में स्वैशप्लेट के झुकाव का कोण,
दोष(टी) - मुख्य रोटर की सामान्य पिच,
वी(टी) - हेलीकाप्टर गति,
एफ टी (टी) - हेलीकाप्टर पिच कोण,
एफ से (टी) - हेलीकाप्टर रोल कोण।
प्रत्येक पैरामीटर के लिए सहसंबंध गुणांक निर्धारित किए जाते हैं

सभी मापदंडों (सहसंबंध गुणांक >0.2) को महत्वपूर्ण के रूप में चुना गया था और उनके लिए अनुमानित वक्र बनाए गए थे और प्रत्येक समय बिंदु और प्रत्येक पैरामीटर के लिए समीकरण संकलित किए गए थे:
चयनित महत्वपूर्ण मापदंडों के अनुसार, अंतिम सूत्र रूप लेता है:
मैट्रिक्स समीकरण को हल करके गुणांक A1, A2, A3, A4, A5, A6 पाए गए:
गणना किए गए झुकने वाले तनाव मान चित्र 1 (वक्र σ कैल्क (टी)) में दिखाए गए हैं।
प्रस्तावित विधि उड़ान संचालन के दौरान किसी भी समय एनवी शाफ्ट के भार स्तर का आकलन करना संभव बनाती है। हेलीकॉप्टर उड़ान मापदंडों की निगरानी के मानक साधनों के उपयोग के आधार पर, यह आपको पूरे उड़ान समय के दौरान झुकने वाले तनाव के स्तर को निर्धारित करने, उड़ान प्रतिबंधों को रिकॉर्ड करने और चालक दल को अनुमेय भार स्तर से अधिक के बारे में सूचित करने के साथ-साथ निर्धारित करने की अनुमति देता है। अवशिष्ट जीवन.
1. टोरसन बार रोटर हब वाले हेलीकॉप्टर के मुख्य रोटर शाफ्ट पर उड़ान के दौरान झुकने वाले तनाव को निर्धारित करने की एक विधि, जिसमें हेलीकॉप्टर के उड़ान प्रदर्शन की निगरानी के मानक तरीकों से पूरे उड़ान समय के दौरान मापना, मुख्य पर भार की गणना करना शामिल है। गणितीय मॉडल का उपयोग करके रोटर शाफ्ट और उनकी अधिकता के मामले में सिग्नलिंग, मापी गई उड़ान प्रदर्शन विशेषताओं में से, रोटर शाफ्ट के लोड स्तर पर सीधा प्रभाव डालने वाले महत्वपूर्ण मापदंडों का चयन और व्यवस्थित किया जाता है, महत्वपूर्ण मापदंडों के कार्यों का अनुमान लगाया जाता है। उड़ान प्रदर्शन विशेषताओं के चयनित मापदंडों पर रोटर शाफ्ट σ(टी) में तनाव की निर्भरता के अंतिम कार्य को निर्धारित करने के लिए, स्वैशप्लेट के रोटेशन के कोणों में परिवर्तन की दरों के पूर्ण मूल्यों को निर्धारित किया जाता है। अनुदैर्ध्य और अनुप्रस्थ दिशाएँ अंतिम फ़ंक्शन में जोड़ी जाती हैं:
2. दावा 1 के अनुसार एक मरोड़ बार रोटर हब के साथ एक हेलीकाप्टर के मुख्य रोटर शाफ्ट पर उड़ान झुकने तनाव का निर्धारण करने के लिए एक विधि, उड़ान प्रदर्शन मापदंडों के महत्व को निर्धारित करने के लिए, मुख्य रोटर पर तनाव की निर्भरता को निर्धारित करने के लिए विशेषता है चयनित मापदंडों पर शाफ्ट प्लॉट किए जाते हैं और गुणांक की गणना की जाती है और सहसंबंधों का मूल्यांकन किया जाता है।
3. दावे 2 के अनुसार टोरसन बार रोटर हब के साथ एक हेलीकॉप्टर के रोटर शाफ्ट पर उड़ान झुकने वाले तनाव को निर्धारित करने की एक विधि, जिसमें विशेषता है कि पैरामीटर का महत्व सहसंबंध गुणांक> 0.2 के मूल्य से निर्धारित होता है।
समान पेटेंट:
आविष्कार मैकेनिकल इंजीनियरिंग के क्षेत्र से संबंधित है, मुख्य रूप से विमान इंजन निर्माण से, और विशेष रूप से उच्च दबाव टरबाइन (एचपीटी) के कामकाजी ब्लेड की भौतिक और यांत्रिक स्थिति को निर्धारित करने की एक विधि से, विशेष रूप से तनाव की स्थिति से संबंधित है। ब्लेड।
आविष्कार स्व-चालित मशीनों के हाइड्रोलिक पावर ट्रांसमिशन के तकनीकी निदान से संबंधित है। हाइड्रोलिक गियरबॉक्स के गियर स्विच करते समय हाइड्रोलिक क्लच के संचालन की गुणवत्ता का आकलन करने की एक विधि उनके स्विचिंग के दौरान गियर में बिजली के प्रवाह को बाधित किए बिना की जाती है।
आविष्कार मापने की तकनीक से संबंधित है और इसका उपयोग बीयरिंग इकाइयों के साथ इलेक्ट्रिक मोटर्स और अन्य उपकरणों के संचालन में किया जा सकता है ताकि बीयरिंग की वर्तमान स्थिति निर्धारित की जा सके और ऑपरेशन की शुरुआत से एक निश्चित समय के बाद सेवा जीवन की भविष्यवाणी की जा सके।
आविष्कार मापने की तकनीक से संबंधित है और इसका उपयोग रोटर्स के बॉल बेयरिंग पर अक्षीय भार को निर्धारित करने के साथ-साथ छोटे तंत्र और उपकरणों के रोटर्स के कंपन की प्राकृतिक आवृत्तियों को निर्धारित और नियंत्रित करने के लिए किया जा सकता है।
आविष्कार मापने की तकनीक से संबंधित हैं, विशेष रूप से पिस्टन रिंग लुमेन की जकड़न को मापने के साधनों और तरीकों से। विधि को लागू करते समय, खुली पिस्टन रिंग को परिधीय दिशा में एक सहायक उपकरण के माध्यम से जोड़ के अधिकतम बंद होने के साथ क्लैंप किया जाता है, और लुमेन की जकड़न ऑप्टिकल साधनों द्वारा निर्धारित की जाती है।
जी. वी. मखोटकिन
प्रोपेलर डिज़ाइन
वायु प्रोपेलरइसने उथले और ऊंचे पानी में चलने वाले उच्च गति वाले जलयानों के साथ-साथ बर्फ, बर्फ और पानी पर चलने वाले उभयचर स्नोमोबाइल्स के लिए एक अनिवार्य प्रणोदन उपकरण के रूप में ख्याति प्राप्त की है। यहां और विदेश दोनों जगह काफी अनुभव पहले ही जमा हो चुका है प्रोपेलर का उपयोग उच्च गति वाले छोटे जहाजों और उभयचरों पर. इस प्रकार, 1964 के बाद से, हमारे देश में डिज़ाइन ब्यूरो द्वारा उभयचर स्नोमोबाइल्स का बड़े पैमाने पर उत्पादन और संचालन किया गया है (चित्र 1)। ए. एन. टुपोलेव। संयुक्त राज्य अमेरिका में, कई दसियों हज़ार एयरबोट, जैसा कि अमेरिकी उन्हें कहते हैं, फ्लोरिडा में संचालित होते हैं।
प्रोपेलर के साथ उच्च गति वाली उथली-ड्राफ्ट मोटर बोट बनाने की समस्या हमारे शौकिया जहाज निर्माताओं की रुचि को जारी रखती है। उनके लिए सबसे सुलभ शक्ति 20-30 एचपी है। साथ। इसलिए, हम ठीक इसी शक्ति की अपेक्षा के साथ वायु प्रणोदन उपकरण को डिजाइन करने के मुख्य मुद्दों पर विचार करेंगे।
प्रोपेलर के ज्यामितीय आयामों का सावधानीपूर्वक निर्धारण इंजन शक्ति का पूर्ण उपयोग करने और उपलब्ध शक्ति के लिए अधिकतम के करीब जोर प्राप्त करने की अनुमति देगा। इस मामले में, प्रोपेलर व्यास का सही विकल्प विशेष महत्व का होगा, जिस पर न केवल प्रणोदन प्रणाली की दक्षता, बल्कि शोर का स्तर भी काफी हद तक निर्भर करता है, जो सीधे परिधीय गति के मूल्य से निर्धारित होता है।
गति पर जोर की निर्भरता के अध्ययन ने स्थापित किया है कि 25 एचपी की शक्ति वाले प्रोपेलर की क्षमताओं का एहसास करना संभव है। साथ। इसका व्यास लगभग 2 मीटर होना चाहिए। न्यूनतम ऊर्जा लागत सुनिश्चित करने के लिए, हवा को एक बड़े क्रॉस-अनुभागीय क्षेत्र के साथ जेट में वापस फेंकना चाहिए; हमारे विशेष मामले में, प्रोपेलर द्वारा प्रवाहित क्षेत्र लगभग 3 वर्ग मीटर होगा। शोर के स्तर को कम करने के लिए प्रोपेलर के व्यास को 1 मीटर तक कम करने से प्रोपेलर द्वारा प्रवाहित क्षेत्र 4 गुना कम हो जाएगा, और इससे जेट में गति में वृद्धि के बावजूद, मूरिंग पर जोर में 37% की गिरावट आएगी। . दुर्भाग्य से, जोर में इस कमी की भरपाई पिच, ब्लेड की संख्या या उनकी चौड़ाई से नहीं की जा सकती है।
जैसे-जैसे गति बढ़ती है, व्यास कम होने से कर्षण में होने वाली हानि कम हो जाती है; इस प्रकार, बढ़ती गति छोटे व्यास वाले स्क्रू के उपयोग की अनुमति देती है। 1 और 2 मीटर व्यास वाले स्क्रू के लिए, जो मूरिंग पर अधिकतम जोर प्रदान करते हैं, 90 किमी/घंटा की गति पर जोर मान बराबर हो जाते हैं। व्यास को 2.5 मीटर तक बढ़ाने से, मूरिंग लाइनों पर जोर बढ़ने से, 50 किमी/घंटा से ऊपर की गति पर जोर में केवल थोड़ी वृद्धि होती है। सामान्य तौर पर, ऑपरेटिंग गति की प्रत्येक सीमा (एक निश्चित इंजन शक्ति पर) का अपना इष्टतम प्रोपेलर व्यास होता है। निरंतर गति से बढ़ती शक्ति के साथ, दक्षता के लिए इष्टतम व्यास बढ़ता है।
चित्र से इस प्रकार है. 2 ग्राफ़, 1 मीटर व्यास वाले प्रोपेलर का जोर 55 किमी/घंटा से अधिक की गति वाले जल प्रोपेलर (मानक) आउटबोर्ड मोटर "नेप्च्यून -23" या "प्रिवेट -22" के जोर से अधिक है, और एक प्रोपेलर 2 मीटर के व्यास के साथ - पहले से ही 30 -35 किमी/घंटा से अधिक की गति पर। गणना से पता चलता है कि 50 किमी/घंटा की गति पर, 2 मीटर व्यास वाले प्रोपेलर वाले इंजन की किलोमीटर ईंधन खपत सबसे किफायती आउटबोर्ड मोटर "प्रिवेट-22" से 20-25% कम होगी।
दिए गए ग्राफ़ के अनुसार प्रोपेलर तत्वों के चयन का क्रम इस प्रकार है। प्रोपेलर का व्यास प्रोपेलर शाफ्ट पर दी गई शक्ति पर मूरिंग लाइनों पर आवश्यक जोर के आधार पर निर्धारित किया जाता है। यदि आबादी वाले क्षेत्रों या ऐसे क्षेत्रों में मोटरबोट का संचालन अपेक्षित है जहां शोर प्रतिबंध हैं, तो स्वीकार्य (आज के लिए) शोर स्तर परिधीय गति - 160-180 मीटर/सेकेंड के अनुरूप होगा। इस सशर्त मानदंड और प्रोपेलर के व्यास के आधार पर, इसके क्रांतियों की अधिकतम संख्या निर्धारित करने के बाद, हम इंजन शाफ्ट से प्रोपेलर शाफ्ट तक गियर अनुपात स्थापित करेंगे।
2 मीटर के व्यास के लिए, शोर स्तर के संदर्भ में अनुमेय गति लगभग 1500 आरपीएम होगी (1 मीटर के व्यास के लिए - लगभग 3000 आरपीएम); इस प्रकार, 4500 आरपीएम की इंजन गति पर गियर अनुपात लगभग 3 (1 मीटर के व्यास के लिए - लगभग 1.5) होगा।
चित्र में ग्राफ़ का उपयोग करना। 3 यदि प्रोपेलर व्यास और इंजन शक्ति का चयन पहले ही किया जा चुका है तो आप प्रोपेलर थ्रस्ट की मात्रा निर्धारित कर सकते हैं। हमारे उदाहरण के लिए, सबसे अधिक उपलब्ध शक्ति वाला इंजन चुना गया - 25 एचपी। एस., और स्क्रू का व्यास 2 मीटर है। इस विशेष मामले के लिए, थ्रस्ट मान 110 किलोग्राम है।
विश्वसनीय गियरबॉक्स की कमी शायद सबसे गंभीर बाधा है जिसे दूर किया जाना है। एक नियम के रूप में, हस्तशिल्प परिस्थितियों में शौकीनों द्वारा बनाई गई चेन और बेल्ट ड्राइव अविश्वसनीय हो जाती हैं और उनकी दक्षता कम होती है। सीधे मोटर शाफ्ट पर जबरन स्थापना से व्यास को कम करने की आवश्यकता होती है और परिणामस्वरूप, प्रणोदन इकाई की दक्षता कम हो जाती है।
ब्लेड की चौड़ाई और पिच निर्धारित करने के लिए, आपको चित्र में दिए गए नॉमोग्राम का उपयोग करना चाहिए। 4. क्षैतिज दाएं पैमाने पर, प्रोपेलर शाफ्ट पर शक्ति के अनुरूप बिंदु से, एक ऊर्ध्वाधर रेखा खींचें जब तक कि यह प्रोपेलर के पहले पाए गए व्यास के अनुरूप वक्र के साथ प्रतिच्छेद न हो जाए। चौराहे के बिंदु से हम बाएं क्रांति पैमाने पर स्थित एक बिंदु से खींची गई ऊर्ध्वाधर रेखा के साथ चौराहे तक एक क्षैतिज रेखा खींचते हैं। परिणामी मूल्य डिज़ाइन किए गए प्रोपेलर की कोटिंग की मात्रा निर्धारित करता है (विमान निर्माता ब्लेड की चौड़ाई और व्यास के योग के अनुपात को कोटिंग कहते हैं)।
दो-ब्लेड प्रोपेलर के लिए, कवरेज ब्लेड की चौड़ाई और प्रोपेलर त्रिज्या आर के अनुपात के बराबर है। कवरेज मूल्यों के ऊपर इष्टतम प्रोपेलर पिचों के मूल्य हैं। हमारे उदाहरण के लिए, हमने प्राप्त किया: कवरेज σ=0.165 और सापेक्ष पिच (पिच से व्यास का अनुपात) h=0.52। 1 मीटर व्यास वाले पेंच के लिए σ=0.50 मीटर और h=0.65। 2 मीटर व्यास वाला प्रोपेलर 16.5% आर की ब्लेड चौड़ाई के साथ 2-ब्लेड वाला होना चाहिए, क्योंकि कवरेज की मात्रा छोटी है; 1 मीटर व्यास वाला प्रोपेलर 50:3 = 16.6% आर की ब्लेड चौड़ाई के साथ 6-ब्लेड या 50:2 = 25% आर की ब्लेड चौड़ाई के साथ 4-ब्लेड वाला हो सकता है। ब्लेड की संख्या बढ़ाने से और कम हो जाएगी शोर का स्तर.
सटीकता की उचित डिग्री के साथ, हम मान सकते हैं कि प्रोपेलर पिच ब्लेड की संख्या पर निर्भर नहीं करती है। हम 16.5% आर की चौड़ाई के साथ एक लकड़ी के ब्लेड के ज्यामितीय आयाम प्रस्तुत करते हैं। सभी आयाम ड्राइंग चित्र में हैं। 5 प्रतिशत त्रिज्या में दिये गये हैं। उदाहरण के लिए, खंड डी 16.4% आर है, जो 60% आर पर स्थित है। खंड तार को 10 बराबर भागों में विभाजित किया गया है, यानी, प्रत्येक 1.64% आर; पैर का अंगूठा 0.82% आर से टूटता है। मिलीमीटर में प्रोफ़ाइल निर्देशांक प्रत्येक कोटि के अनुरूप प्रतिशत मान से त्रिज्या को गुणा करके निर्धारित किया जाता है, अर्थात 1.278 से; 1.690; 2.046 ... 0.548.
हेलीकॉप्टर के मुख्य रोटर ब्लेड को इस तरह से बनाया जाना चाहिए कि, आवश्यक उठाने वाला बल बनाते हुए, वे उन पर रखे गए सभी भारों का सामना कर सकें। और वे न केवल झेलेंगे, बल्कि उड़ान के दौरान और जमीन पर हेलीकॉप्टर के रखरखाव के दौरान होने वाली सभी प्रकार की अप्रत्याशित घटनाओं के लिए सुरक्षा का मार्जिन भी रखेंगे (उदाहरण के लिए, हवा का तेज झोंका, ऊपर की ओर हवा का प्रवाह, तेज हवा का झोंका) पैंतरेबाज़ी, ब्लेड की आइसिंग, इंजन लॉन्च करने के बाद प्रोपेलर का अयोग्य घुमाव, आदि)।
हेलीकॉप्टर के मुख्य रोटर को चुनने के लिए डिज़ाइन मोड में से एक गणना के लिए चुनी गई किसी भी ऊंचाई पर ऊर्ध्वाधर चढ़ाई मोड है। इस मोड में, प्रोपेलर के घूर्णन के तल में ट्रांसलेशनल गति की कमी के कारण, आवश्यक शक्ति अधिक होती है।
डिज़ाइन किए जा रहे हेलीकॉप्टर के वजन के बारे में जानने और हेलीकॉप्टर द्वारा उठाए जाने वाले पेलोड के आकार को निर्धारित करने के बाद, वे प्रोपेलर का चयन करना शुरू करते हैं। प्रोपेलर का चयन प्रोपेलर के व्यास और प्रति मिनट उसके चक्करों की संख्या को चुनने के लिए आता है, जिस पर प्रोपेलर द्वारा बिजली के कम से कम व्यय के साथ डिज़ाइन लोड को लंबवत रूप से उठाया जा सकता है।
यह ज्ञात है कि मुख्य रोटर का जोर उसके व्यास की चौथी शक्ति के समानुपाती होता है और केवल क्रांतियों की संख्या की दूसरी शक्ति के समानुपाती होता है, अर्थात, मुख्य रोटर द्वारा विकसित जोर संख्या की तुलना में व्यास पर अधिक निर्भर होता है क्रांतियों का. इसलिए, चक्करों की संख्या बढ़ाने की तुलना में व्यास बढ़ाकर दिया गया जोर प्राप्त करना आसान है। इसलिए, उदाहरण के लिए, व्यास को 2 गुना बढ़ाकर, हम 24 = 16 गुना अधिक जोर प्राप्त करते हैं, और क्रांतियों की संख्या को दोगुना करके, हम केवल 22 = 4 गुना अधिक जोर प्राप्त करते हैं।
रोटर को चलाने के लिए हेलीकॉप्टर में जो इंजन लगाया जाएगा उसकी शक्ति जानने के लिए सबसे पहले रोटर के व्यास का चयन करें। इसके लिए निम्नलिखित अनुपात का उपयोग किया जाता है:
रोटर ब्लेड बहुत कठिन परिस्थितियों में काम करता है। इस पर वायुगतिकीय बलों द्वारा कार्य किया जाता है जो इसे मोड़ते हैं, मोड़ते हैं, इसे फाड़ते हैं, और त्वचा को इससे दूर कर देते हैं। ऐसी वायुगतिकीय शक्तियों का "प्रतिरोध" करने के लिए, ब्लेड पर्याप्त मजबूत होना चाहिए।
बर्फ़ जमने के लिए अनुकूल परिस्थितियों में बारिश, बर्फ़ या बादलों में उड़ते समय, ब्लेड का संचालन और भी कठिन हो जाता है। तेज गति से ब्लेड से टकराने वाली बारिश की बूंदें पेंट को गिरा देती हैं। जब ब्लेडों पर बर्फ जम जाती है, तो बर्फ की वृद्धि हो जाती है, जो इसकी प्रोफ़ाइल को विकृत कर देती है, इसकी स्विंग गति में बाधा डालती है और इसे भारी बना देती है। जमीन पर हेलीकॉप्टर का भंडारण करते समय, तापमान, आर्द्रता और सूरज की रोशनी में अचानक परिवर्तन से ब्लेड पर विनाशकारी प्रभाव पड़ता है।
इसका मतलब यह है कि ब्लेड न केवल मजबूत होना चाहिए, बल्कि बाहरी वातावरण के प्रभाव से भी प्रतिरक्षित होना चाहिए। लेकिन अगर केवल यही! फिर ब्लेड को पूरी तरह से धातु बनाया जा सकता है, इसे जंग-रोधी परत से ढक दिया जाएगा, और समस्या हल हो जाएगी।
लेकिन एक और आवश्यकता है: इसके अलावा, ब्लेड हल्का भी होना चाहिए। इसलिए, इसे खोखला बनाया जाता है। ब्लेड का डिज़ाइन धातु स्पर पर आधारित होता है, जो अक्सर परिवर्तनीय क्रॉस-सेक्शन का एक स्टील पाइप होता है, जिसका क्षेत्र धीरे-धीरे या चरणबद्ध तरीके से मूल भाग से ब्लेड के अंत तक घटता जाता है .
ब्लेड के मुख्य अनुदैर्ध्य बल तत्व के रूप में स्पर, कतरनी बलों और झुकने वाले क्षण को अवशोषित करता है। इस संबंध में, ब्लेड स्पार का संचालन विमान विंग स्पार के समान है। हालाँकि, रोटर रोटेशन के परिणामस्वरूप ब्लेड स्पार भी केन्द्रापसारक बलों के अधीन होता है, जो कि विमान विंग स्पार के मामले में नहीं है। इन बलों के प्रभाव में, ब्लेड स्पार तनाव के अधीन है।
अनुप्रस्थ बल सेट - ब्लेड की पसलियों को जोड़ने के लिए स्टील फ्लैंग्स को स्पर पर वेल्डेड या रिवेट किया जाता है। प्रत्येक पसली, जो धातु या लकड़ी हो सकती है, में दीवारें और अलमारियाँ होती हैं। धातु शीथिंग को धातु की अलमारियों से चिपकाया जाता है या वेल्ड किया जाता है, प्लाईवुड शीथिंग को लकड़ी की अलमारियों से चिपकाया या वेल्ड किया जाता है, या प्लाईवुड शीथिंग को पैर की अंगुली से चिपकाया जाता है और कैनवास शीथिंग को पूंछ पर सिल दिया जाता है, जैसा कि दिखाया गया है। प्रोफ़ाइल के धनुष भाग में, रिब फ़्लैंज सामने के स्ट्रिंगर से जुड़े होते हैं, और पूंछ वाले भाग में - पीछे के स्ट्रिंगर से जुड़े होते हैं। स्ट्रिंगर सहायक अनुदैर्ध्य शक्ति तत्वों के रूप में कार्य करते हैं।
पसलियों के किनारों को ढकने वाली त्वचा किसी भी अनुभाग में ब्लेड की प्रोफ़ाइल बनाती है। सबसे हल्का लिनेन आवरण है। हालाँकि, पसलियों के बीच के क्षेत्रों में कपड़े के आवरण के विक्षेपण के परिणामस्वरूप प्रोफ़ाइल के विरूपण से बचने के लिए, ब्लेड की पसलियों को अक्सर एक दूसरे से लगभग 5-6 सेमी की दूरी पर रखना पड़ता है, जिससे ब्लेड भारी. खराब ढंग से फैले हुए कपड़े के आवरण वाले ब्लेड की सतह पसलीदार दिखती है और इसमें वायुगतिकीय गुण कम होते हैं, क्योंकि इसका खिंचाव अधिक होता है। एक चक्कर के दौरान, ऐसे ब्लेड की प्रोफ़ाइल बदल जाती है, जो हेलीकॉप्टर के अतिरिक्त कंपन की उपस्थिति में योगदान करती है। इसलिए, कपड़े के आवरण को डोप से संसेचित किया जाता है, जो सूखने पर कपड़े को मजबूती से खींचता है।
प्लाईवुड की खाल बनाते समय, ब्लेड की कठोरता बढ़ जाती है और कपड़े से ढके ब्लेड की तुलना में पसलियों के बीच की दूरी 2.5 गुना बढ़ सकती है। प्रतिरोध को कम करने के लिए, प्लाईवुड की सतह को सुचारू रूप से संसाधित और पॉलिश किया जाता है।
एक खोखला ऑल-मेटल ब्लेड बनाकर अच्छे वायुगतिकीय आकार और बड़ी ताकत हासिल की जा सकती है। इसके उत्पादन में कठिनाई वैरिएबल क्रॉस-सेक्शन के एक स्पर के निर्माण में निहित है, जो प्रोफ़ाइल का धनुष बनाता है। ब्लेड प्रोफाइल का पिछला भाग शीट मेटल आवरण से बना होता है, जिसके प्रमुख किनारों को स्पर में फ्लश वेल्ड किया जाता है, और अनुगामी किनारों को एक साथ जोड़ा जाता है।
हेलीकॉप्टर रोटर ब्लेड प्रोफाइल को इस तरह से चुना जाता है कि जैसे-जैसे हमले का कोण बढ़ता है, हमले के उच्चतम संभावित कोण पर प्रवाह रुक जाता है। पीछे हटने वाले ब्लेड पर प्रवाह रुकने से बचने के लिए यह आवश्यक है, जहां हमले के कोण विशेष रूप से ऊंचे हैं। इसके अलावा, कंपन से बचने के लिए, प्रोफ़ाइल को इस तरह से चुना जाना चाहिए कि हमले का कोण बदलने पर दबाव के केंद्र की स्थिति न बदले।
ब्लेड की ताकत और प्रदर्शन के लिए एक बहुत ही महत्वपूर्ण कारक दबाव के केंद्र और प्रोफ़ाइल के गुरुत्वाकर्षण के केंद्र की सापेक्ष स्थिति है। तथ्य यह है कि झुकने और मरोड़ की संयुक्त क्रिया के तहत, ब्लेड स्व-उत्तेजित कंपन के अधीन होता है, यानी लगातार बढ़ते आयाम (स्पंदन) के साथ कंपन। कंपन से बचने के लिए, ब्लेड को तार के सापेक्ष संतुलित किया जाना चाहिए, यानी, तार पर गुरुत्वाकर्षण के केंद्र की स्थिति इस तरह से सुनिश्चित की जानी चाहिए जिससे स्वयं-बढ़ते कंपन को रोका जा सके। संतुलन बनाने का कार्य यह सुनिश्चित करना है कि निर्मित ब्लेड की प्रोफ़ाइल का गुरुत्वाकर्षण केंद्र दबाव के केंद्र के सामने है।
रोटर ब्लेड की कठोर परिचालन स्थितियों पर विचार करना जारी रखते हुए, यह ध्यान दिया जाना चाहिए कि बारिश की बूंदों से ब्लेड की लकड़ी की त्वचा को होने वाले नुकसान को इसके अग्रणी किनारे के साथ शीट धातु के किनारे को मजबूत करके रोका जा सकता है।
ब्लेड आइसिंग से निपटना अधिक कठिन कार्य है। यदि उड़ान में ठंढ और कर्कश जैसी बर्फ हेलीकॉप्टर के लिए कोई बड़ा खतरा पैदा नहीं करती है, तो कांच की बर्फ, धीरे-धीरे और अगोचर रूप से, लेकिन ब्लेड पर बेहद मजबूती से बढ़ती है, जिससे ब्लेड का वजन बढ़ जाता है, इसकी प्रोफ़ाइल विकृत हो जाती है और, अंततः, उठाने वाले बल में कमी हो जाती है, जिससे हेलीकॉप्टर की नियंत्रणीयता और स्थिरता में तीव्र हानि होती है।
एक समय में यह सिद्धांत अस्तित्व में था कि ब्लेड के फड़फड़ाने की गति के कारण उड़ान के दौरान बर्फ टूट जाएगी। ब्लेड की आइसिंग सबसे पहले जड़ वाले हिस्से से शुरू होती है, जहां फड़फड़ाते समय ब्लेड का मोड़ छोटा होता है। इसके बाद, बर्फ की परत ब्लेड के अंत की ओर और अधिक फैलने लगती है, और धीरे-धीरे गायब हो जाती है। ऐसे ज्ञात मामले हैं जब जड़ भाग पर बर्फ की मोटाई 6 मिमी तक पहुंच गई, और ब्लेड के अंत में - 2 मिमी।
बर्फ़ जमने से रोकने के दो तरीके हैं।
पहला तरीका- यह उड़ान क्षेत्र में मौसम के पूर्वानुमान का सावधानीपूर्वक अध्ययन है, रास्ते में आने वाले बादलों से बचना और बर्फ़ीली स्थिति से बाहर निकलने के लिए उड़ान की ऊँचाई को बदलना, उड़ान को रोकना आदि।
दूसरा तरीका- ब्लेडों को एंटी-आइसिंग उपकरणों से लैस करना।
इन उपकरणों की एक पूरी श्रृंखला हेलीकॉप्टर ब्लेड के लिए जानी जाती है। रोटर ब्लेड से बर्फ हटाने के लिए, आप ऐसा कर सकते हैं
एक अल्कोहल डिसर का उपयोग किया जाना चाहिए, जो प्रोपेलर के अग्रणी किनारे पर अल्कोहल का छिड़काव करता है। उत्तरार्द्ध, जब पानी के साथ मिलाया जाता है, तो इसका हिमांक कम हो जाता है और बर्फ बनने से रोकता है।
रोटर ब्लेड से बर्फ को हवा द्वारा काटा जा सकता है, जिसे रोटर के अग्रणी किनारे पर रखे रबर कक्ष में पंप किया जाता है। फुलाने वाला कक्ष बर्फ की परत को तोड़ देता है, जिसके अलग-अलग टुकड़े आने वाले वायु प्रवाह द्वारा प्रोपेलर ब्लेड से दूर चले जाते हैं।
यदि रोटर ब्लेड का अग्रणी किनारा धातु से बना है, तो इसे या तो बिजली से गर्म किया जा सकता है या रोटर के अग्रणी किनारे के साथ बिछाई गई पाइपलाइन के माध्यम से गर्म हवा द्वारा गर्म किया जा सकता है।
भविष्य दिखाएगा कि इनमें से किस पद्धति का व्यापक अनुप्रयोग होगा।
मुख्य रोटर की वायुगतिकीय विशेषताओं के लिए, मुख्य रोटर ब्लेड की संख्या और रोटर द्वारा प्रवाहित क्षेत्र पर विशिष्ट भार का बहुत महत्व है। सैद्धांतिक रूप से, रोटर ब्लेड की संख्या कोई भी हो सकती है, एक से लेकर असीमित बड़ी संख्या तक, इतनी बड़ी कि वे अंततः एक सर्पिल सतह में विलीन हो जाती हैं, जैसा कि लियोनार्डो दा विंची की परियोजना में या आई बायकोव के हेलीकॉप्टर-साइकिल में माना गया था। .
हालाँकि, ब्लेडों की एक निश्चित संख्या होती है जो सबसे अधिक लाभप्रद होती है। ब्लेड की संख्या तीन से कम नहीं होनी चाहिए, क्योंकि दो ब्लेड के साथ बड़े असंतुलित बल और प्रोपेलर थ्रस्ट में उतार-चढ़ाव होता है। एकल-ब्लेड और दो-ब्लेड प्रोपेलर के लिए एक रोटर क्रांति के दौरान इसके औसत मूल्य के आसपास मुख्य रोटर थ्रस्ट में परिवर्तन दिखाया गया है। तीन-ब्लेड प्रोपेलर व्यावहारिक रूप से संपूर्ण क्रांति के दौरान औसत जोर मूल्य को बनाए रखता है।
रोटर ब्लेड की संख्या भी बहुत बड़ी नहीं होनी चाहिए, क्योंकि इस मामले में प्रत्येक ब्लेड पिछले ब्लेड से परेशान प्रवाह में काम करता है, जिससे मुख्य रोटर की दक्षता कम हो जाती है।
जितने अधिक प्रोपेलर ब्लेड होंगे, वे स्वेप्ट डिस्क के क्षेत्र के उतने ही बड़े हिस्से पर कब्जा कर लेंगे। भरण कारक ओ की अवधारणा को हेलीकॉप्टर रोटर सिद्धांत में पेश किया गया है, जिसकी गणना कुल क्षेत्रफल के अनुपात के रूप में की जाती है
हेलीकॉप्टर मुख्य रोटर (खड़ी चढ़ाई) के डिज़ाइन ऑपरेटिंग मोड के लिए, सबसे अनुकूल भरण कारक मान 0.05-0.08 (औसत मान 0.065) है।
यह भार औसत है. कम भार 9-12 किग्रा/एम2 की सीमा का भार है। इतना भार उठाने वाले हेलीकॉप्टर चलने योग्य होते हैं और उनकी परिभ्रमण गति अधिक होती है।
सामान्य प्रयोजन हेलीकाप्टरों का औसत भार 12 से 20 किग्रा/एम2 तक होता है। और अंत में, एक बड़ा भार, जिसका उपयोग शायद ही कभी किया जाता है, 20 से 30 किग्रा/एम2 तक का भार होता है।
तथ्य यह है कि यद्यपि बहे हुए क्षेत्र पर उच्च विशिष्ट भार हेलीकॉप्टर के लिए एक बड़ा पेलोड प्रदान करता है, यदि इंजन विफल हो जाता है, तो ऐसा हेलीकॉप्टर स्व-रोटेशन मोड में तेजी से उतरेगा, जो अस्वीकार्य है, क्योंकि इस मामले में सुरक्षा की वंश से समझौता किया गया है।